
“遥想当年愿,终也只成念,无非梦醒言成谶。”
很久以来我就想写一篇关于更先进的扩散模型的blog,但其发展速度实在是太快了。我上次动手训扩散模型甚至都是2年前了,2年过去,有了翻天覆地的变化。在现在的数据规模下,我们已经知道一个高质量的生成模型,可能更取决于构造的latent。而至于DDPM还是流匹配,可能没那么重要。所以这篇blog其实只是想借着学习这一套东西的由头,复健一下看公式的感觉。
Continuous Diffusion
对扩散模型最直接的理解就是”一步一步的加噪,一步一步的去噪。“,在加噪时,从第$i-1$步加噪到第$i$步的过程为:
下面我们尝试对这个过程进行连续化。我们希望每“一步”尽可能的小,那样我们会增加总的步数$N$,这会导致$\beta_i$的取值相应地变小。在DDPM里,$\beta_i$如下计算:
我们发现,随着$N$的增加,$\beta_i$逐渐变小,而$\beta_i\cdot N$始终不变,构成一个稳定的方差序列。当$N\rightarrow \infty$时,$\beta_i \cdot N$构成一个连续函数,我们记$t=\frac{i-1}{N-1}\in \left[ 0,1 \right] $。不致以混淆,我们记这个连续函数为$\beta(\cdot)$。同时,我们记连续函数$x(t),\epsilon(t)$,他们都等于先前的离散值:
我们取$\Delta t=\frac{1}{N}$,先前的加噪过程即可表示为:
由等价无穷小:
移项后,可得:
这个方程的形式非常接近于一个微分方程,只不过$\sqrt{\beta \left( t \right) \mathrm{d}t}\epsilon \left( t \right) $这一项我们仍然无法处理。为了解决这一项,我们需要引入一些随机过程的基本知识。
Stochastic Process
考虑样本空间$\varOmega$和一个指标集$T$,指标集$T$往往具有时间的含义。随机过程是定义在$\varOmega \times T$上的二元函数$X(\omega,t)$,固定样本点$\omega$,则$X(\omega,t)$就是一个关于$t$的函数,称为轨道;如果固定时间$t$,那么$X(\omega,t)$就是一个我们熟悉的随机变量,服从于某个概率分布。很多时候我们略去$\omega$,将随机过程直接记作$\left\{ X\left( t \right) \right\} $,而一般用小写的$x_t$表示某个样本点或具体取值。那样,在每个时间$t$下,其概率密度函数记作$f(x;t)$,概率分布函数记作$F(x;t)$。
跟概率论时一样,我们也可以定义一些数字特征来描述一个随机过程:
其中$R(t_1,t_2)$称作自相关函数,$C(t_1,t_2)$称作协方差函数,他们用于刻画随机过程自身在两个时间状态之间的关系。
在机器学习课中,我们学过一种非参数化的模型:高斯过程。下面我们回顾一下这个经典的模型,来对随机过程这个概念加深印象。高斯过程指的是一个无限维的高斯分布,对于指标集$T$,如果我们选取$t_1,t_2,…,t_n\in T$,使得得到的$n$维向量$\{\xi_1,\xi_2,…,\xi_n\}$服从一个$n$维的高斯分布,那么我们就说$\{\xi_t\}$是一个高斯过程。我们无法采样无限多的样本点,所以一般我们会先采样足够多的样本构造一个先验分布。我们用核函数$K(\cdot,\cdot)$来建模先验中的自相关关系。最常用的例如径向基核(RBF kernel):
径向基核张成的协方差矩阵如下图所示:

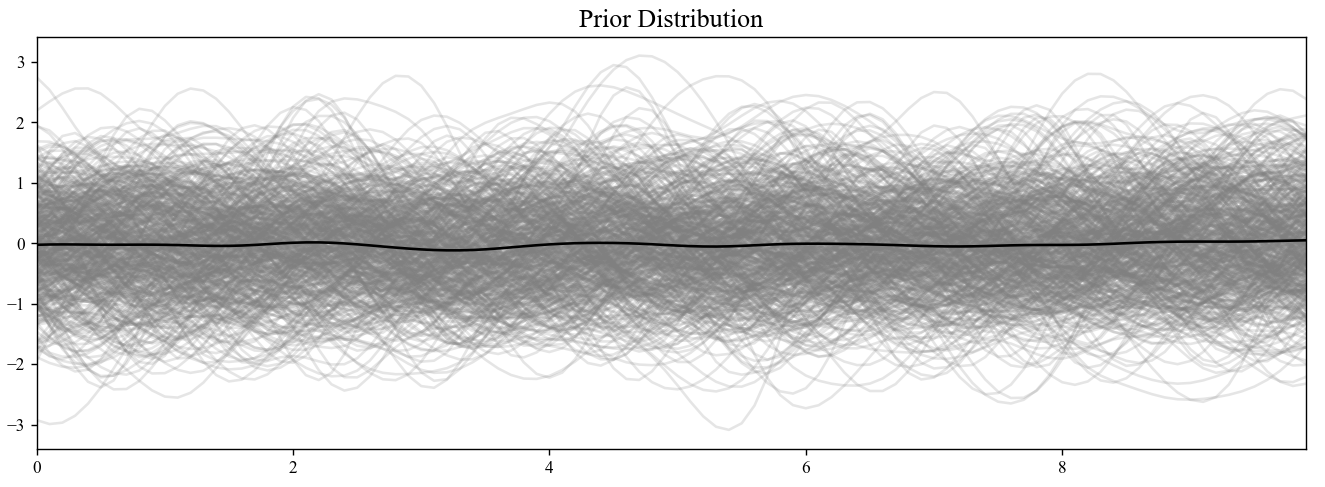
这个基函数的含义即相邻时间戳下的样本值应该越接近。当我们选择不同性质的核函数,协方差矩阵的会呈现不同的性质,例如周期性,线性等。同时我们一般会给定先验分布是零均值的,即$\mu(t)\equiv0$。我们采样100个样本点(即我们构造了一个100维的特征空间),通过生成许多组服从高斯分布的样本,通过$K(\cdot,\cdot)$和$\mu(t)$的线性变换,我们可以采样出许多组轨迹:
当我们有观测数据后,我们就可以计算后验分布了。根据条件高斯分布的性质:
其中$x_a$是我们观测到的数据,$x_b$是先验分布。
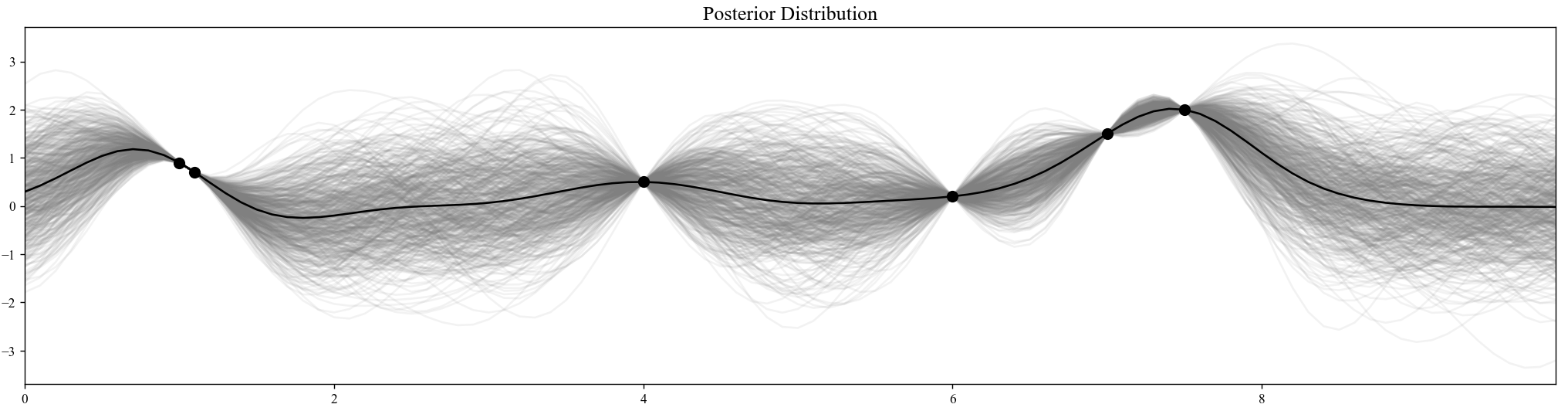
我们就可以直接计算回归后的结果。
现在我们考虑一个非常重要的随机过程:布朗运动,也叫维纳过程。考虑一个对称的一维随机游动,每经过$\Delta t$时间,其等概率地向左或向右移动一步,步长大小为$\Delta x$,记$X(t)$为时刻$t$的位置,则:
当$\Delta t$和$\Delta x$都变得越来越小直至趋于极限,就得到了布朗运动。由于$E\left( X_i \right) =0,\mathrm{Var}\left( X_i \right) =1$,可以得到:
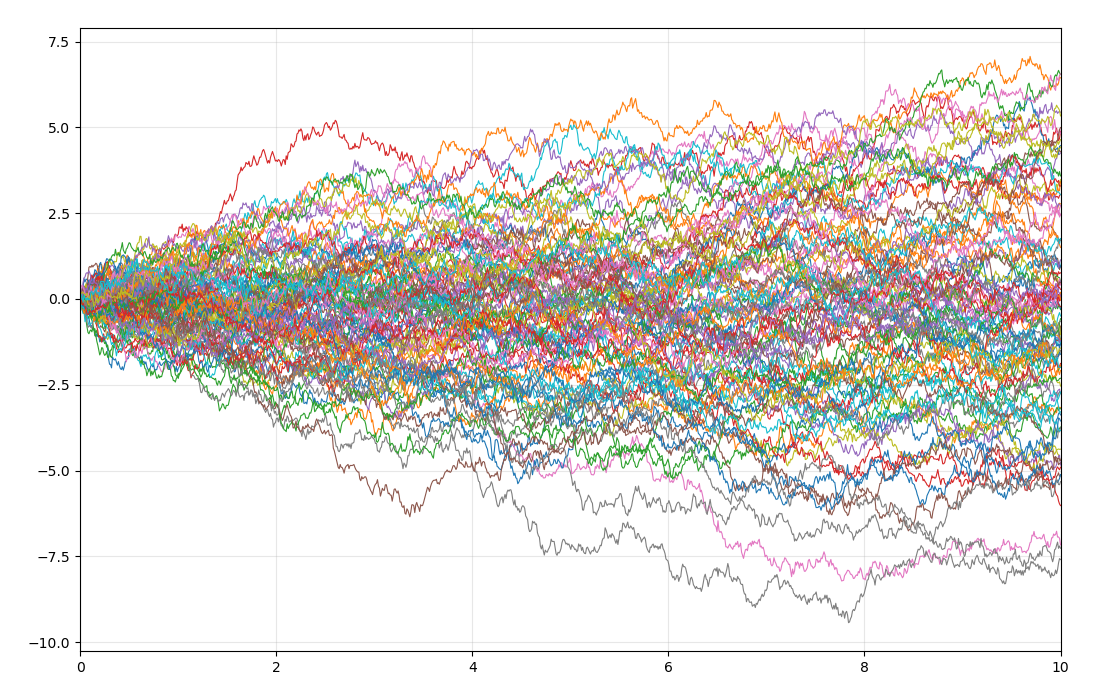
为了让该随机过程是有意义的,需要使$\Delta x$的阶数是$\Delta t$的根号阶,即$\Delta x = c \sqrt{\Delta t}$。这样$\mathrm{Var}\left[ X\left( t \right) \right] =c^2t$。我们可以可视化一下:
以及,我们可以尝试,如果我们不选取$\Delta x$为$\Delta t$的根号阶,例如我们选取$\Delta x=\Delta t$:
这时候,整个过程就没什么意义了。
同时,随着时间间隔的减少,单位时间内移动的次数越来越多。以及$X(t)$可以看作$X(t_i)-X(t_{i-1})$这一系列的随机变量之和,他们是独立同分布的,所以根据中心极限定理:
所以$X(t)$服从正态分布,以及我们能发现,给定当前的$X(t)$以及过去的$X(u)$,将来的$X(t+s)$只依赖于现在,所以布朗运动是马尔可夫过程。同时,$X(t)$也是一个独立增量过程。更进一步,我们有:
这可以通过直接计算得到:
我们现在可以看出一些端倪,这里奇怪的$\sqrt{\Delta t}$阶在$\sqrt{\beta \left( t \right) \Delta t}\epsilon \left( t \right) $也出现了,以及$X\left( t+\Delta t \right) -X\left( t \right) \sim \mathcal{N} \left( 0,c^2\Delta t \right) $,正好对应$\sqrt{\Delta t}\epsilon \left( t \right) $,这并不是偶然。我们如果能也建模一个$\mathrm{d}X$,之前推导的连续的前向扩散过程就能有一个完整的答案。
在初学微积分的时候,我们都有知道一些直观的例子,比如求积分其实是无数个离散求和$f(x_{k+1})-f(x_k)$。积分成立的条件是那个求和级数收敛,但对于布朗运动,并不存在这样的条件。因为$X\left( t+\Delta t \right) -X\left( t \right) \sim \mathcal{N} \left( 0,c^2\Delta t \right) $,随着时间的累积,其“变差”并不是有界的,我们称之为无界变差:
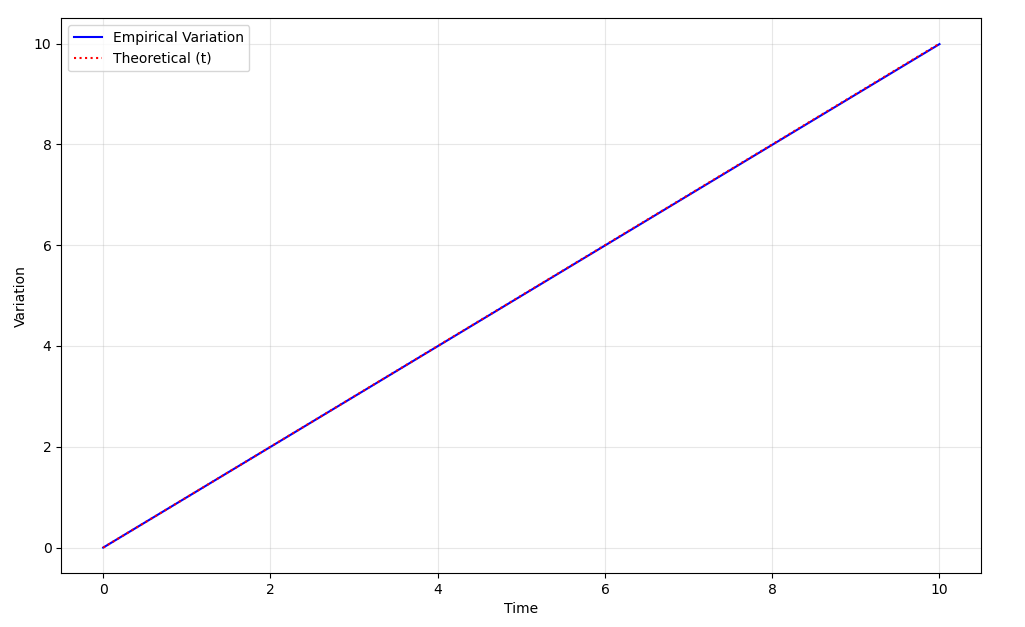
但一个事实是,布朗运动的二阶变差是存在的,并且增量的平方和最终趋近于关于时间的线性函数。我们用标准布朗运动($c$取1)来说明这个事实,考虑:
下面我们说明其方差趋近于零,由于独立增量过程是高斯的,其$D(X^2)$的计算并不那么容易,我们先给出:
于是我们就可以直接计算了:
当$\delta$够小时,方差可以认为是0,所以,我们得到::
我们也可以简单可视化一下:
接下来,为了不至混淆,我们取其提出者维纳的首字母$W(t)$来表示布朗运动$X(t)$:
此时,等号右侧可以看作一个$0$到$t$上的常规积分。而对于左侧,我们定义$W\left( t_{i+1} \right) -W\left( t_i \right) $为$\mathrm{d}w$,那么就有:
我们称$\mathrm{d}w$是$\mathrm{d}t$的半阶项,这引导出了与常规微积分中不同的一个本质性的变化。首先,直观上感觉,如果$\mathrm{d}t$趋近于零,此时$\mathrm{d}w\mathrm{d}w$趋近于零,如果将其中一个$\mathrm{d}w$替换为$\mathrm{d}t$,则当然也趋近于零。不过为了放心,我们在上面求二阶变差时进行一下替换,来看一下:
所以,我们可以说$\mathrm{d}w\mathrm{d}t=0$。现在,我们就能把$\sqrt{\beta \left( t \right) \Delta t}\epsilon \left( t \right) $写作$\sqrt{\beta \left( t \right)}\mathrm{d}w$了,即:
这样,我们就得到了连续化的DDPM,它是一个一阶随机微分方程。更广义的看,上述微分方程可以写作:
此时对于该微分方程描述的随机过程$\{X(t)\}$,我们称其为伊藤过程。该方程称为伊藤随机微分方程,或扩散方程。$f(\cdot,\cdot)$和$g(\cdot,\cdot)$是两个确定的函数,$f(\cdot,\cdot)$称为漂移(shift)函数,$g(\cdot,\cdot)$称为扩散(diffuse)函数。我们连续化DDPM得到的就是一组特殊的$f(x(t),t)$和$g(x(t),t)$。
对于伊藤过程$X(t)$,我们有伊藤引理。简单来说,由于半阶项的性质,我们有:
即对于$f(X(t),t)$,在泰勒展开时,我们要多展开一项,这样其他的高阶项在积分意义上才为0。
Turn Back the Clock
我们现在对扩散模型的前向过程有了完整的答案,现在我们要考虑其逆向过程。这个任务是很艰巨的,我们要利用一些工具。首先我们先可视化一个简单的伊藤过程:
左侧是许多样本轨迹,右侧是每个时刻$t$时由当前的样本点估计出的概率密度函数。我们很自然的发现一件事情,给定随机微分方程,这个方程侧重于描述单个样本的性质;而有时我们很想知道在某个时刻$t$时全体样本的概率分布。
Fokker-Planck Equation
我们首先所要引入的工具是福克-普朗克(Fokker-Planck)方程,记作FP方程。这个方程将给出随机微分方程的边际分布$p(x_t,t)$,在下文中为了简洁,我们省略显式的时间依赖,如将$p(x_t,t)$记作$p(x_t)$。推导这个方程需要用到分部积分,而高维情形下的分部积分会给理解这个过程带来不必要的麻烦,所以我们下面就只在一维情形下进行推导。对于一个伊藤过程:
在后面的内容中有时会出现例如$\mu(X_t,t)$和$\mu(x_t,t)$这样的不同,他们具有不同的涵义当我们用大写的$X_t$书写时,往往指代整个随机过程。用小写的$x_t$则表示某一时刻或状态下的具体样本,一般用于描述随机微分方程。
常用的方法是构造辅助函数,我们记$p(x_t,t)$是$X_t$在$t$时的概率密度函数,给定$t_1 < t_2$,我们定义一个函数$F(t,x)$,其满足$F(t_1,x)=F(t_2,x)=0$。出于后面推导的目的,我们还需要$\lim _{x\rightarrow \pm \infty}F\left( t,x \right) =0,\lim _{x\rightarrow \pm \infty}\frac{\partial F\left( t,x \right)}{\partial x}=0$。那么显然,$F\left( t,x_t \right) =\left( t-t_1 \right) \left( t-t_2 \right) p\left( x_t,t \right) $满足这个要求。
由伊藤引理:
然后我们在两边求期望,这样会消去维纳过程那一项:
我们在两边同时从$t_1$积分$t_2$,不讲武德地交换积分和期望的性质,等式的左侧会是0:
而等式的右侧,会构成三项积分:
注意,当期望展开的时候,第一次出现了$p(x_t)$。下面我们会继续不讲武德的进行轮换和分部积分:
在计算$I_2$时就用到了$\lim_{x\rightarrow \pm \infty} F\left( t,x \right) =0$:
在计算$I_3$时,用到的就是$\lim_{x\rightarrow \pm \infty} \frac{\partial F\left( t,x \right)}{\partial x}=0$:
由于$I_1+I_2+I_3=0$,我们有:
由于$F\left( t,x_t \right) $是任意选取的,这就引导里的那一项为零:
这个方程就是一维的FP方程,对于多维的情形,可以直接将偏微分推广至梯度算子:
这就是一般情形下的FP方程。也就是说我们给定这个偏微分方程的边界条件,即$p(x_0)$,我们可以通过解这个偏微分方程来直接得到$p(x_t)$。对应到熟悉的DDPM里,就是所谓前向过程的重参数化技巧,可以直接从$x_0$加噪到$x_T$。但我们并不会去解这个偏微分方程,只是用这个方程去导引一些等价变换。
我们在这里先预热一个例子:在扩散模型中,扩散函数$\sigma(\cdot,\cdot)$一般与$x_t$无关,例如我们可以取一个满足$g^2(\cdot)\le\sigma^2(\cdot)$的函数,作下面的代换:
这说明,如果我们将$\mu \left( x_t,t \right) $换成$\mu \left( x_t,t \right) -\frac{1}{2}\left( \sigma ^2\left(t \right) -g^2\left(t \right) \right) \nabla _{x_t}\log p\left( x_t \right) $,将$\sigma ^2\left(t \right) $换成$g ^2\left( t \right) $,其描述的是两个边际分布完全等价的随机过程。也就是说:
这个事实非常深刻。因为他告诉我们,我们可以人为的改变方差,而不影响$p(x_t)$。我们在后面给出逆向过程的随机微分方程后,这会带来更大的功用。
以及,在推导中,出现了$\nabla _{x_t}\log p\left( x_t \right) $,他是当前的对数概率密度函数的梯度。在这个推导里,他的出现看起来很生硬,因为他正好是对数微分的直接结果,我们稍后会看到一个关于这一项更直接的来源,以及其背后的含义。
Kolmogorov Backward Equation
我们已经知道的是,我们可以通过FP方程来等价出一系列的随机过程。但我们仍然没能回答逆向过程,我们可以先形式化上写出我们希望得到的逆向过程:
这里的问题在于,我们并不知道逆向过程的漂移函数$\bar{f}(\cdot,\cdot)$和扩散函数$\bar{g}(\cdot,\cdot)$。在1982年的那篇Reverse-time diffusion equation中,作者使用了许多引理来严谨的给出逆向过程的表达,其用到的技术比较复杂。但其在最后也指出了一个便于理解的证明,理解这个证明我们只需要额外再补充一个关于柯尔莫哥洛夫(Kolmogorov)后向方程的知识。实际上,刚才推导的FP方程也叫柯尔莫哥洛夫前向方程,其简记为KFE(Kolmogorov Forward Equation),后向方程则就简记为KBE。
KBE关注的是过渡概率密度函数,即之前的GIF中,右侧的分布是怎么变化的。给定时间$t_0 < t$,过渡概率密度函数记作$p(x,t|x_0,t_0)$,即给定$t_0,x_0$下,$x$和$t$的分布。所以KBE关注的是$\frac{\partial p\left( x,t|x_0,t_0 \right)}{\partial t_0}$,这个式子会很令人困惑。因为我们要取微分的$t_0$,同时出现在了条件里。我们可以这样理解这个偏导数:当概率分布逐渐在时间上向后演化并以$x_0$为条件时,$x$在更晚的时间$t$上的概率分布将如何变化?
类似地,我们选取$t_0 < t_1 <t$,取$t_1=t_0+\Delta t$。由扩散过程的性质,此时样本的状态也满足$x_1=x_0 + \Delta x$。我们可以写出在这个微小的时间步里的状态转移方程:
我们将其带入到KBE关注的偏导数的定义中去:
由过渡概率密度函数的性质:
于是有:
对$p\left( x,t|x_0+\Delta x,t_1 \right) $进行泰勒展开,展到二阶:
带回原来极限里的那个积分里,就有:
我们可以发现,现在积分和$\Delta t$构成的那两项分别代表着随机过程在时间上的均值和方差,考虑:
由于维纳过程均值为0方差为1,可以计算:
由变上限积分的求导可得:
另一方面,对其取偏微分,我们先操作均值:
我们发现这自动引出了一个条件期望,而这其实就对应着我们控制$x_0,t_0$时向$x_1,t_1$的演化。其实就对应着想求的极限里的积分项。
对于方差,道理是一样的:
于是,我们就得到了:
在$t_0$和$t_1$差距很小时,我们就可以将等号右边的$t_1$改写为$t_0$:
这就是KBE方程。关于这个方程的功用和意义很令人困惑,我们可以将KBE方程与FP方程放在一起,来直观的理解一下:
我们现在考虑这几个值:在时间$t$时的$x_t$,以及在$s$时的$x_s$,其中$t\le s$。那么对于KFE/FP方程,其中$\partial t$和$\partial x_t$对应的就是$s$和$x_s$,相当于固定$t$时的$x_t$,将其作为初始条件,然后“前向”地计算$s\ge t$时的分布。而对于KBE方程,其中的$\partial t_0$和$\partial x_0$就对应我们选取的$t$和$x_t$。而$s$和$x_s$就被固定,作为边界条件,所以“后向地”计算$t\le s$时的分布。更简洁的说:
前向方程指的是:假如我知道现在的初始条件,未来会发生什么?
后向方程指的是:假如我知道未来的目标状态,现在的条件如何影响这个目标?
举一个很形象的例子,假如你站在一个河流旁边,看到从上游流下来了一个小纸船。前向方程可以用来计算在下游这个小船之后会怎么漂,而后向方程是用来推测这个小船是怎么在上游流下来的,这就是“backward”的来源。所以这并不是“逆转时间”,我们不应把“backward”理解成“reverse”。
Reverse-time SDE
通过刚才的两个推导,我们已经知道,描述$x_t$的随机微分方程和由Kolmogorov方程给出的概率分布$p(x_s,s|x_t,t),s\ge t$是一一对应的。所以,一个随机微分方程的逆向过程,也可以通过先找到其Kolmogorov方程,然后对应过来。
下面为了推导时的简洁,我们不显式的写出概率分布和漂移/扩散函数对于时间$t$的依赖。自然地,我们希望拿到一个关于$p(x_t)$的描述,注意这里的$p(x_t)$与KFE时的并不一样,这里$t\le s$,此时的$p(x_t)$之于之前的讨论,确实是“过去”的状态。
考虑贝叶斯公式:
对两边求取关于$t$的偏导:
然后我们就可以把KBE方程和KFE方程代入进去:
对于等号右侧中的三个偏导,可以进一步展开:
我们先只将前两项的展开进行代入,先不要代入$p(x_t)\sigma^2(x_t)$关于$x_t$的二阶偏导,在复杂的化简后可以得到:
回忆我们的目的,我们希望推导出一个关于$p(x_t)$的偏微分方程,这个偏微分方程的形式要和KFE/FP方程一致,这样我们就能找到对应的逆向过程了。观察上式,我们已经凑出了关于概率分布和漂移函数的乘积的偏微分,下面我们需要凑出$\frac{1}{2}\frac{\partial ^2\left[ p\left( x_{s,}x_t \right) \sigma ^2\left( x_t \right) \right]}{\partial ^2x_t}$,我们考察要凑的这个式子,我们可以通过贝叶斯公式找到他和我们想代换的那两项的关系:
我们可以将$p(x_s|x_t)$记作$u$,$p(x_t)\sigma^2(x_t)$记作$v$,那么由莱布尼茨公式:
我们想构造的那一项即变为了:
我们联立上面的式子:
我们在两边对$x_s$作积分,我们无脑认为我们可以交换微分和积分的顺序,这样将积分符号移到里面不影响结果,终于得到了:
这个偏微分方程描述了$t\le s$时的$p(x_t)$的分布,
根据KFE方程,这个偏微分方程对应的随机过程是:
我其实不是很好解释那个负号的“吸收”,我不确定认为逆向维纳过程$\mathrm{d}\bar{w}$跟正向的$\mathrm{d}w$这样差个负号是不是对的。但考虑$\mathrm{d}w$其实就是白噪声,差个负号好像也没啥影响……
在扩散模型的情形下,扩散函数往往与$x_t$无关,所以可以把扩散函数从偏微分里拿出来,然后就又出现了对数微分的结构:
我们用梯度算子替代偏导,推广到多维情形:
这就是逆向时候的随机微分方程。如同Score-Based Generative Modeling through Stochastic Differential Equations中的teaser一样,我们可以模拟一下一个简单的正向和逆向过程:
我们又一次看见了对数概率密度函数的梯度。这一项的出现并不是偶然。
先前,我们人为构造了这样的前向过程:
其中$g^2(\cdot)\le\sigma^2(\cdot)$,那么我们可以根据刚才的推导写出其逆向过程,只需要用$\mu \left( x_t,t \right) -\frac{1}{2}\left( \sigma ^2\left( t \right) -g^2\left( t \right) \right) \nabla _{x_t}\log p\left( x_t \right) $替代前向过程里的$\mu(x_t,t)$:
我们把这两个式子写在一起:
忙了这么久,就为了中间差的这个正负号。如果我们增加$g(t)$,在前向过程里,这会导致$\nabla _{x_t}\log p\left( x_t \right) $这一项变小;而在逆向过程里,这会导致$\nabla _{x_t}\log p\left( x_t \right) $变大。以及对于逆向过程,只有$\nabla _{x_t}\log p\left( x_t \right) $是我们不知道的。一个自然的推断是,这一项一定跟扩散模型里神经网络要预测的噪声有关,因为在DDPM的前向和反向里,我们也是只不知道$\epsilon_t$。
我们不禁好奇$\nabla _{x_t}\log p\left( x_t \right) $的意义,我们将$\mu(x_t,t)$和$g(t)$都先置为0,然后取$\sigma(t)$为2来忽略掉这一项的系数。我们得到了这样的一个方程:
根据梯度的意义,$\nabla _{x_t}\log p\left( x_t \right) $是驱使$x_t$沿着概率密度函数上升最快的方向移动,从而将样本移动到高概率密度的区域。如果我们选取$p(x_t)$为某种高斯分布,可以更直接的感受到这一点。因为在高斯分布下,$\mathrm{log}p(x_t)$的结果就是一个L2-范数,把所有常系数都记作$k$:
那么就自然展开成了一个关于分布均值的滑动平均。$\nabla _{x_t}\log p\left( x_t \right) $被称为得分(Score),在Generative Modeling by Estimating Gradients of the Data Distribution中,作者提出Score Model Langevin Dynamics(SMLD)通过Noise Conditional Score networks(NCSN)来估计得分,这里我们不再展开了。我们仅指出得分与噪声的关系,我们先指出一个参数估计的工具:特威迪(Tweedie)公式,这个公式是关于参数估计,他在意的是给定观测数据${x_i}$时对分布参数$\theta_i$的估计。其考虑条件期望$\mathbb{E} \left[ \theta |x \right] $,假设分布$p(x|\theta)\sim \mathcal{N}(\theta,\sigma^2)$,可以从观测数据里估计$\sigma^2$,我们记高斯分布的概率密度函数为$f(x)$,有:
进一步,我们计算条件期望$\mathbb{E} \left[ \theta |x \right] $:
这个公式的意义是说,后验期望和先验分布$p(\theta)$无关,我们可以用样本估计$p(x)$的分布,然后计算$\sigma ^2\frac{\mathrm{d}}{\mathrm{d}x}\log p\left( x \right)$来进一步修正估计的$\theta$。而在DDPM里,我们知道,对于加噪过程$q(x_t|x_0)$,其服从于$\mathcal{N} \left( x_t;\sqrt{\bar{\alpha}_t}x_0,\left( 1-\bar{\alpha}_t \right) \right) $,那么我们带入Tweedie公式:
而我们又知道,在去噪过程中:
所以,我们得到了:
所以预测的噪声其实就对应于反方向的得分,这是非常自然的。
Probability ODE
现在我们考虑逆向过程的SDE:
其实最美妙的事情是我们可以直接选取$g(t)\equiv 0$,这样整个方程就变成了一个普通的常微分方程:
我们可以可视化此时的逆向轨迹:
可以看到我们修改了采样时的方差,但边际分布仍然保持不变。这样的常微分方程,我们称为概率流(Probability Flow)微分方程。实际上,省略掉维纳项的形式,就对应着diffusion加速的经典策略—DDIM。通过微分方程的框架,我们可以很自然的理解为什么我们可以在训练时按照DDPM,而采样时按照DDIM,因为他们的边际分布是一样的。同样DDIM可以进行“跳步”现在看来也有一个直觉的理解:“在没有噪声项时,轨迹可以变得更“直”。就像数值分析里解微分方程那样,就不需要迭代那么多次了”。
如何让轨迹变得更“直”这个想法非常的深刻,他直接导向了这篇blog的最终目的:Flow-matching。但在此之前我们先简单的提及单纯地从解微分方程出发,来加速diffusion的一系列工作:DPM-Solver。
在此之前,我们引入的例子是线性方差调度的DDPM,但实际上方差调度和均值的变化是可以更灵活的。例如现在人们都喜欢用余弦式的方差调度器。我们考虑更一般的加噪情形$q\left( x_t|x_0 \right) =\mathcal{N} \left( x_t|\alpha _t x_0,\sigma ^2_t \right) $,现在我们需要计算这个过程对应的漂移函数和扩散函数,我们考虑加噪过程:
由条件高斯分布的性质:
代入加噪过程后,在等式两边求取微分:
对应到我们希望的正向SDE的形式,这里形式有一点小小的变化,我们规定漂移函数的形式是$\mu(x_t,t)=f(t)x_t$,规定扩散函数的形式是$\sigma(x_t,t)=g^2(t)$,实际上在炼丹中人们选取的也都是这种形式:
于是我们有:
则对应的逆向时的概率流ODE即为:
将得分替换为噪声,最后整理为:
那么由常数变易法,这个微分方程的通解是:
我们在时间区间里选取$t<s$,可以将常数$C$赋为$s$,这样逆向过程的解就是:
实际上到了这一步,我们就可以应用一些传统的ODE求解器来进行求解了,例如龙格库塔,隐式欧拉等。但DPM-Solver的作者进一步指出,在这种通解下,仍然有待挖掘的部分。
$f(t)$是已知的,所以$e^{\int_s^t{f\left( \tau \right) \mathrm{d}\tau}}=e^{\int_s^t{\frac{\mathrm{d}\log \alpha _{\tau}}{\mathrm{d}\tau}\mathrm{d}\tau}}=\frac{\alpha _t}{\alpha _s}$。同时我们清理积分项以内的内容,记$\lambda _t=\log \frac{\alpha _t}{\sigma _t}$,那么可以验证:
$\lambda_t$也被记作“半对数信噪比”,因为在扩散模型中习惯定义$SNR=\frac{\alpha _{t}^{2}}{\sigma _{t}^{2}}$为信噪比(Signal-Noise-Ratio)。
于是逆向过程的解可以化为:
所以实际上概率流方程的解呈现一种“半线性(semi-linear)”结构,前面那一项是纯粹的线性项。那么我们考虑相邻的$x_{t_{i-1}}$到$x_{t_i}$的过程,那么很自然的我们可以考虑对积分项进行近似,具体来说就是对预测出的噪声项作$k$阶泰勒展开:
那么代入原式就会得到:
关于估计预测噪声的高阶导数的方法是很成熟的,而这个推导出的结果就是DPM-Solver。特别地,对于$k=1$时:
此时的DPM-Solver,他其实就是DDIM
Flow Matching
其实为了理解Flow Matching,并不需要引入SDE,逆向过程等复杂的内容,可以直接从ODE的角度来切入。但我们马上会看到其实我们前面的推导并没有白费。
在做了前面的准备工作以后,我们就可以以一个更广义的视角来切入Flow Matching了。实际上Flow并不是一个新的词,在先前有一类“Flow-based”的生成模型,在Normalizing Flow(NF)里,是用多个神经网络模拟多步的概率变换,通过变量替换定理,通过设计估计雅可比行列式,来通过这种逐步的方法来最大化似然。在Continuous Normalizing Flow(CNF)中,作者构造了所谓“瞬时换元公式”,来连续化了这个过程。使得在NF里使用的多个神经网络变成一个与时间相关的神经网络。他们都是为了直接最大化似然函数,而后者第一次提出了“Neural ODE”这一概念:
不管是先前的Flow-based model还是现在的Flow matching,他们的都估计一个向量场$u(x,t)$,只不过相比于NF和CNF直接去优化极大似然,Flow matching是想通过指定一种概率路径$p(x_t)$,然后用神经网络将与这个概率路径对应的向量场学出来,概率路径与向量场的关系由连续性方程来描述:
这个方程具有深刻的物理意义,其描述了在没有源或出口的情况下,分布在时间上的变化和空间上的变化是守恒的。
NF和CNF被称为“simulation-based”,因为他们确实是在硬杠$\mathrm{log}p(x)$,但这种方法的效果并不好,而且非常复杂,并没有引发很多人的关注。我对这种方法的细节知之甚少,他们还没凉的时候我都没上大学呢。但直觉上,他们效果没那么好的原因,可能是因为从一个分布到另一个分布的路径可以是无限多的,也对应着无限多的向量场。然而直接优化似然函数相当于同时要拟合这个路径和向量场,这背后的复杂程度可能导致这种方法没办法得到进一步扩展。而Flow matching则被称为“simulation-free”。
然而我们会发现,FP方程中$g(t)\equiv0$时恰好也有这样的形式:
到了这一步我们可以感受到,扩散模型似乎是Flow matching的某种特例。
在Flow matching中,作者推广了这一结果。在下面的讨论里往往约定$t\in[0,1]$,起始分布记作$p_0$,目标分布记作$p_1$,中间任意时刻的分布记作$p_t(x)$。即理解为0下标是“噪声”,1下标是数据,和扩散模型的推导正好反着。而由于$u(x,t)$在物理意义上,其实就是速度场,所以记作$u_t(x)$,即某时刻下描述整个场的速度分布。
所以最直接的办法就是用神经网络学一个对应的速度场$v_{\theta}(x,t)$,然后优化:
即Flow Matching Loss,但就如同Score-Matching,以及推导DDPM的时候一样,由于我们根本不知道真实的$u_t(x)$,直接虚空打靶了。所以作者巧妙地构造了一系列条件分布,来使得这个目的是可达的。
首先,考虑概率路径:
其中$q(\cdot)$是一个用于采样的分布(可以是均匀分布,高斯分布)。对于下面这种形式的速度场:
可以证明,条件速度场$u_t(x|z)$可以替代边缘速度场$u_t(x)$。
“边缘速度场”是作者起的名字。
这个证明的逻辑是,如果可以通过条件速度场$u_t(x|z)$可以导出条件概率分布$p_t(x|z)$(即满足连续性方程),那么从“边缘速度场”$u_t(x)$也能导出边缘概率分布$p_t(x)$:
即我们通过验证,在这种情况下,连续性方程仍然成立。在此基础上,作者进一步给出了Conditional Flow Matching Loss:
并且证明$\mathcal{L} _{\mathrm{CFM}}$和$\mathcal{L} _{\mathrm{FM}}$在优化上是等价的。由于二范数展开后实际上就是两项的二范数以及他们的内积,速度场/条件速度场是真值,我们只需验证:
所以,事情开始起了变化。我们现在并不是要考虑“加噪”,“去噪”层面上的问题,也不是“正向”“逆向”。我们发现通过引入$z$,我们只需要设计一个$u_t(x|z)$,只要他能满足连续性方程(推出$p_t(x|z)$,并且保证$p_0$和$p_1$可以通过边缘化$q(z)$得到:
这就是Flow matching。
特别地,如果我们取$z=x_1$,考虑像扩散模型一样加噪去噪:
这个概率路径被称为“高斯概率路径”,那么代入进连续性方程,可以得到其对应的条件速度场是:
而如果我们选取先前推导扩散模型时用的常用方案,取$\mu_t(x_1)=\alpha_t x_1, \sigma_t(x_1)=\sigma_t$,那么其实得到的就是DDIM。从结果上看,这样的Gaussian Flow Matching相当于DDPM训练时加入了关于信噪比的权重。
不过对于扩散模型这样的过程,我们以前可以从逆向SDE和概率流ODE里直接得到速度场的表达,而不需要用条件速度场:
“随机过程已经帮我推导过了。”——佚名
比如对于DDIM,其实就有:
也能像DDPM那样采样,只不过由于维纳过程的存在,在真正采样的时候要记得追加噪声:
然而,在扩散模型中,我们都是取初始分布为高斯分布,并没有考虑初始分布与目标分布的联系。我们如果取:
这个的结果令人震惊,那些繁杂的关于方差的权重都消失了。然而这个结果导致的事实是,我们在训练时,只需要采样一个噪声$X$和一个目标(例如图片)$Y$,然后再采样一个时间$t$,就能用$tY+(1-t)X$来表示从$p_t(x|z)$里采样;然后我们只需要让神经网络的输出跟$\left| Y-X \right| ^2$接近即可,这个结论实在是简洁优雅。这就是Rectified Flow。
一个直接的想法是,如果按照Rectified Flow这样构造,假设一开始噪声和数据是“成对”的,那么这个过程会变得更加的完美。然而我们每次都是随机的噪声,噪声与数据的匹配也是随机的,这是不现实的。所以在其文中提出了一种“Reflow”的策略,即先训一个Flow Matching出来,然后用训出来的噪声与数据的配对来“拉直”整个演化的过程。不过这种形式自然会将讨论的方向引导到最优传输(Optimal Transport)理论,会牵扯到更多复杂的内容,等到有时间再去学了。
我们现在可以做一些有趣的实验,模拟一个二维的过程,来可视化一下整个过程。我们可以选取一个自己希望模拟的分布,然后用一个简单的神经网络来模拟一下演化过程:
Appendix
至此,讨论接近尾声。其实在最后,我还想讨论一个很概念的事情,就是“为什么总是有各种神奇的“条件”构造?”。思考这个问题对炼丹毫无任何帮助,恰如”朝菌不知晦朔,蟪蛄不知春秋”。但我不是朝菌,也不是蟪蛄,所以要至少记录下对这个问题的思考。
在一开始学diffusion的时候,先是那神之一手$p(x_{t-1}|x_t,x_0)$,然后在Flow matching里,是这个“条件速度场”里的$z$;在Score Matching里,则是我们因为不知道真实分布的对数概率梯度,然后对分布$x$进行加噪扰动,得到$\tilde{x}$,然后用$\nabla _x\log p\left( \tilde{x}|x \right) $进行优化。所以为什么会有这么多“条件”?
我的一个推测是:给定一个数据集,数据集里有许多样本。我们不知道他的分布$p_{data}$,但我们知道里面的每个样本。通过拟合以单个样本为条件的分布,我们总是可以得到整个分布的。例如,Flow matching中由连续性定理证明的如果$u(x|z)$能推导出$p(x|z)$,那么$u(x)$就能推导出$p(x)$,这其实就是说通过拟合以某个样本为条件的速度场,最终会完成整个速度场的拟合。从这个角度上看,GAN,VAE,Diffusion,Flow matching的训练,都是在求解某种“margin”。
另一个角度上看,以及以样本为条件,会限制整个过程的自由度,令其更稳定(至少更容易收敛)。例如CNF就因为有“无限多”概率路径而很难扩展,另一个现象是在DDPM的推导里,鲜为人知的是,如果直接用ELBO一条道走到黑,是会得到一个结果的。这在Understanding Diffusion Models: A Unified Perspective被记载,如果直接推导,则最后的需要求解关于$q\left( x_{t-1},x_{t+1}|x_0 \right) $的期望。而如果引入$x_0$,就会变成我们寻常认识里的关于$q(x_t|x_0)$的期望。而这个期望实践起来非常简单,我们只需要抽数据,加噪,就可以了。而前者就复杂的多了。
End
SDE是可以reverse的,但很可惜的是人生没法reverse,因为没有人会为你估计$\nabla_x\mathrm{log}p(x)$。这几天很难绷,如果当时去做General 3DV,会不会面试就过了;或者,如果当时大四抓紧时间,去follow diffusion相关的,而不是去乱猜w2c, c2w和有没有transpose,事情会不会有些转机。现在论文论文没有,实习实习被挂,只能说是短视了。
“笑言今日事,何苦旧时痴,皆为年少风流思。”

