
“再回首,读来路;少年轻狂,犹如南柯一梦。”
前段时间一直在瞎忙,没什么时间写blog。最近开摆了,可以有时间写点了。这篇blog计划学习一下一个最近开源的脸部追踪器VHAP,这个tracker实现的非常好,可以看出作者(们)功力之深厚。VHAP相比之前开源的tracker有了很大的改进,包括但不限于推广到多视角视频,实现FLAME几何的估计,更准确的关键点监督。
Facial tracking是一个历史悠久的需求,具体来说是输入一段视频,需要逐帧地知道每一帧时人脸的状态。人脸的“状态”一般由参数化模型描述,在当下的语境里一般是FLAME。其一般通过对齐人脸检测出的关键点和FLAME的关键点来实现近似的估计,然后进一步用光度损失(photometric loss),结合可微渲染来进行精细的优化。
实际上,还存在另外一种facial tracking的方案,尤其针对多视点的数据集:通过多视图立体视觉(multi-view stereo)来从多视角图片中估计一个稠密的mesh,然后将这个mesh通过关键点对齐配准到标准模板上。这种方案并不涉及任何光度损失,但无法估计头发的几何。
在介绍VHAP之前,我想先记录基于关键点反投影来对齐的一些细节,然后再进入VHAP的细节。对于关键点对齐部分,主要是一些理论推导;对于VHAP部分,则主要记录一些实践细节和代码技巧。实际上,VHAP的实现具有规范的项目结构,并且以前所未有的力度对一些细节进行了实现。对其他基于可微渲染的优化都具有很好的指导意义。
Landmarks Alignment
通过优化Landmark来进行追踪在很早的时候就被采用了,那时候还没有FLAME,用的是BFM。也没有PyTorch,计算依靠CPU。当时的优化是需要显式的来求解析解的。这样的结果虽然不是很精细,但能满足实时性的要求。这个过程现在完全可以通过PyTorch的可微渲染来实现,并且可以以很快的速度执行,但知道其细节还是比较重要的。
考虑投影到的landmark与检测到的landmark的残差向量$\mathbf{r}\left( \mathbf{X} \right) $,我们希望优化:
一般用的是预定义的68个关键点,所以$\mathbf{r}\left( \mathbf{X} \right) \in \mathbb{R} ^{136\times 1}$。其中$\mathbf{X}\in \mathbb{R} ^{n\times 1}$,表示参数化模型的系数(如表情,形状等)。这是一个最小二乘问题,可以直接用高斯牛顿法来进行优化,我们先进行一阶线性近似:
其中$\mathbf{X}^t$是当前的参数化模型的系数,雅可比矩阵$\mathbf{J}\in \mathbb{R} ^{136\times n}$定义为:
一阶近似后,代价函数变为:
将其展开:
省略常数项,优化目标即近似为:
这个式子以$\Delta \mathbf{X}$为自变量,系数矩阵$\mathbf{J}^T\mathbf{J}$是半正定的。其极值的必要条件是:
其中$\mathbf{J}^T\mathbf{J}$记作伪海塞矩阵$\mathbf{H}$,$\mathbf{J}^T\mathbf{r}\left( \mathbf{X}^t \right) $记作梯度$\mathbf{g}$。所以更新步长为:
此时$\mathbf{H}\in \mathbb{R}^{n\times n}$,当$n$很大时求解这个矩阵的逆是复杂的,有时会采用共轭梯度法或者其他优化方法。
进一步,我们考虑$\mathbf{X}=\left[ \mathbf{p};\mathbf{s};\mathbf{e} \right] $的一个具体情形,其中$\mathbf{p}\in \mathbb{R}^{n_p},\mathbf{s}\in \mathbb{R}^{n_s},\mathbf{e}\in \mathbb{R}^{n_e}$。得到投影坐标点的过程可以记作:
$\mathbf{x}^{\mathrm{proj}}\in \mathbb{R} ^{2\times 68}$为投影得到的坐标,为了和上文一致我们用$\mathrm{vec}\left( \cdot \right) $记号将其重排成$\mathbb{R} ^{136\times 1}$:
$\mathbf{V}(\cdot)\in\mathbb{R}^{}$是3DMM生成的那些被当作landmark的顶点。$\mathcal{P}\in\mathbb{R}^{2\times3}$为投影矩阵,$\mathbf{t}\in\mathbb{R}^{2\times1}$是平移向量,计算时自动广播成$\mathbf{t}\in\mathbb{R}^{2\times68}$。记人脸检测器得到的landmark向量为$\mathbf{x}^{\mathrm{det}}\in \mathbb{R} ^{136\times 1}$,那么实际上雅可比矩阵的每一列(残差分量对某一个系数$\mathbf{X_j}$的偏导):
下面我们给出在系数$\mathbf{X}_j$表达不同3DMM系数时$\mathbf{J}_j$的形式,为了简洁就省去向量化算符$\mathrm{vec}$了。
当$\mathbf{X}_j=\mathbf{s}_i$时:
当$\mathbf{X}_j=\mathbf{e}_i$时:
当$\mathbf{X}_j=\mathbf{p}_i$时,姿态往往由$\mathbf{p}_i$构成的旋转$\mathbf{R}$和平移$\mathbf{t}$决定:
其中$\frac{\partial \mathbf{R}}{\partial \mathbf{X}_j}$的计算由具体的旋转表示给出,此处从略。而针对平移向量,结果是简单的单位向量:
据组里的传奇大师兄所说,当时他做这一块的时候还是要拿C++手写雅可比矩阵来作tracking。今天手推一下简单情形的$\mathbf{J}$,聊表敬意。如果将上面的过程其实换成FLAME,述公式的形式会复杂的多。因为涉及一堆blendshape,推一遍没什么意义,直接皈依自动微分就好了。另外,FLAME提供了BFM到FLAME的映射,这样可以把在BFM上追踪的结果直接换算到FLAME上。
VHAP
VHAP提供了单目视频和nersemble数据集两种模式,作者为这两种模式写了统一的接口:
1 | tracker = GlobalTracker(cfg) |
在不同的cfg下会触发不同的调用。我们先从单目视频的情形下入手。这样一方面是比较简单,另一方面是我们可以借助单目视频下的情形把优化项都看一遍,这样在多视角的情况下我们就不需要关心优化函数了。
Add Teeth
GlobalTracker继承自FlameTracker,在其初始化方法中会先调用FlameTracker的构造方法。在FlameTracker中,执行了FLAME的实例化FlameHead以及渲染后端render的构造。作者这里使用的是FLAME2023,并且在常用的FLAME类的基础上进行了修改。第一个逆天操作是给FLAME增加牙齿,为什么说这是个逆天操作呢,因为我丝毫做不到这样实现。一种最简单的方法是用blender把mesh上下嘴唇部手动给连上面,然后进行UV映射,调整成合适的UV布局。这样当然并不是真的牙,但为了单纯表达牙和口腔内部也能凑合用了。
在GaussianBlendshapes里,一个高年级博士生实现的方法是,先手动构造两个近似牙齿形状的面(如下图所示)
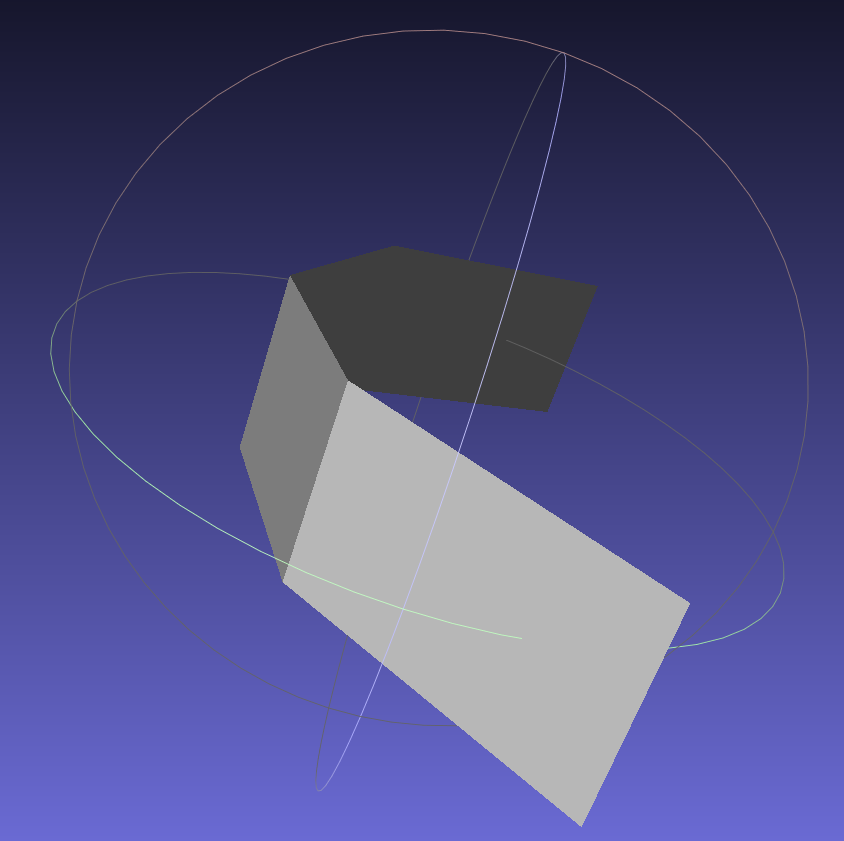
然后测出一个合适的offset,在代码里把这两个面塞进mesh上合适的位置。由于GaussianBlendshapes的设计,这只是一个简单的面,没有构造UV映射。为了让其能跟着下巴的运动而动,还需要写一些代码将每次下巴的刚体变换拿出来,然后分别给这两个面用,这带来了不少麻烦。处理的已经很巧妙了但仍然有些不优雅。
然而VHAP,也就是GaussianAvatars做法:
是一个形状非常像牙的“牙”,而不是瓦楞纸或者一层膜,以及还构造了一个很均匀的UV坐标(哪怕按照GaussianAvatars的做法这并不是必须的)。而这个操作纯粹是在代码中实现的,不需要引入第三方的工具,这个补牙的操作的实现充满着作者对FLAME的理解。首先的起手式是FLAME提供的关于顶点的masks:
FLAME在一个*.pkl中提供了如下部分的masks:
1 | {face, neck, scalp, boundary, right_eyeball, left_eyeball, |
在构造FlameHead时,会构造一个FlameMask,在FlameMask的初始化时,会执行self.process_vertex_mask(flame_parts_path)来读取保存了masks的pkl文件:
1 | def process_vertex_mask(self, flame_parts_path): |
这里有两处玄机,一个是self.v = BufferContainer():
1 | class BufferContainer(nn.Module): |
这个类继承自nn.Module,这个类通过重写__repr__,用来让注册进缓冲区(register_buffer)的变量在被打印出来的时候有我们希望的格式。这里的self.v在追加part_masks后,如果我们将其打印出来,会得到:
1 | (Pdb) self.v |
而如果不用BufferContainer来管理的话,会打印出每个变量的全体索引,非常不方便查看。这个小细节非常贴心,我自己写的时候很少考虑这个。
第二处是self.create_custom_mask,在这个函数成员里进一步追加了大量自定义的顶点mask,这些mask在之后计算损失的时候有很大的功用。对于追加牙齿这一feature,我们要关注的是'lip_outside_ring_upper'和'lip_outside_ring_lower',这两者后面会用到。
在处理完顶点的mask后,会处理面索引的mask和纹理坐标的mask:
1 | if self.faces is not None: |
这几个函数基本囊括了对FLAME面,索引,纹理坐标索引之间的所有变换。其中self.construct_vid_table()构造顶点坐标和区域语义的映射(因为一个顶点可能既属于“脖子”也属于“皮肤”),其遍历每个顶点的索引,找到每个顶点都属于哪个部分:
1 | (Pdb) self.vid_to_region[15] |
然后,根据构造的这张表self.vid_to_region,可以进一步计算process_face_mask,这个函数输入形状为[9976, 3]的faces,是每个面片对应的顶点索引。在process_face_mask中,我们利用self.vid_to_region查询每个面片属于的3个顶点都属于哪些面:
1 | face_masks = defaultdict(list) # region name -> face id |
这里的count >= 3也是一处细节,保证了face_masks边界的“光滑”。因为如果选取count > 1,在count=3的面片附近的那个面总是至少有count >= 2的,会产生锯齿状的区域。如果选取count >= 1,那么一些孤立的线也会被认为是区域,这是不合适的。在最后,像处理顶点时一样,构造了一个self.f = BufferContainer():
1 | self.f = BufferContainer() |
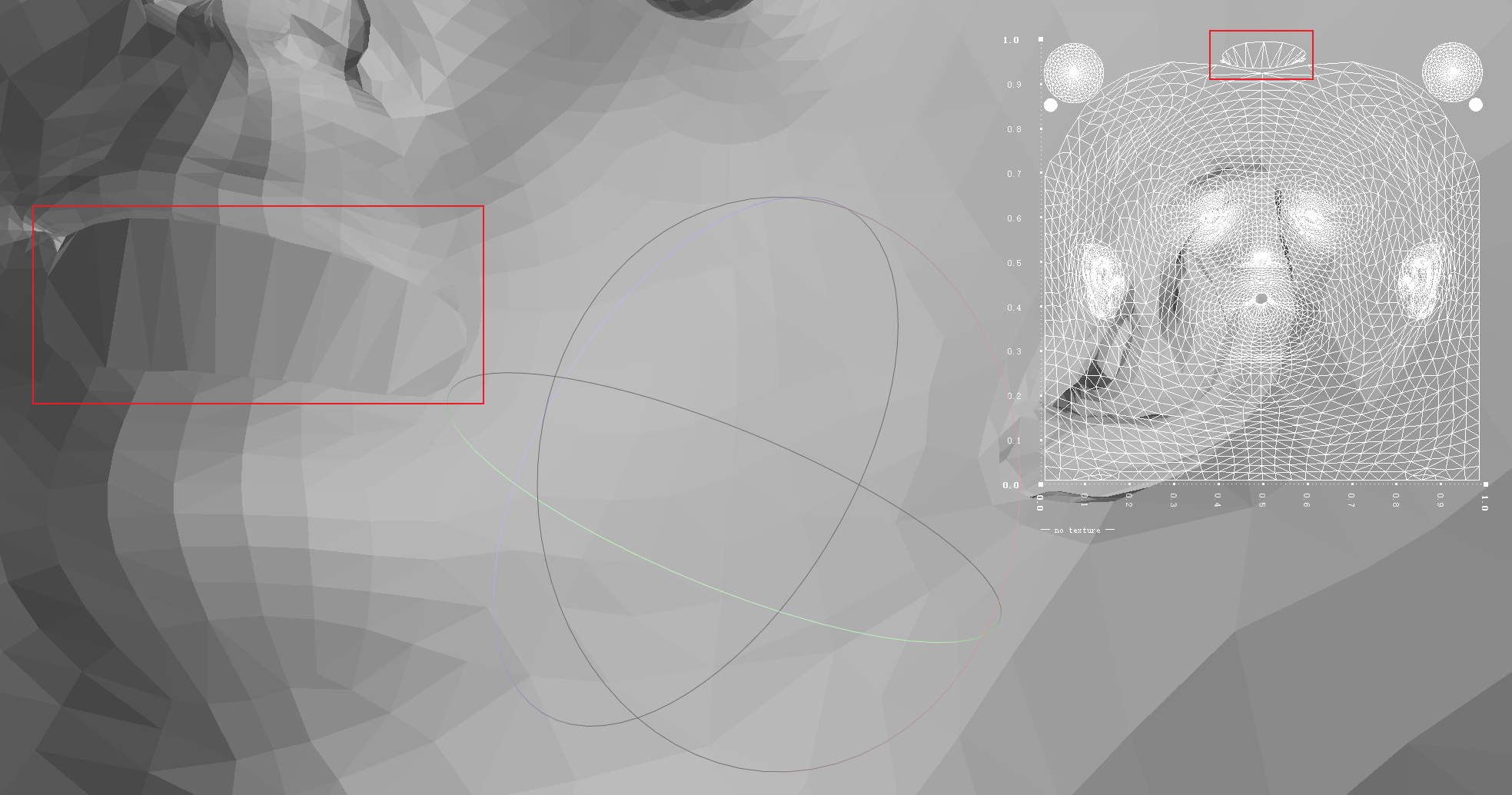
计算纹理坐标上面片的mask与上述原理相同。做了这些准备工作以后,就可以追加牙齿了。追加牙齿的逻辑全部封装在了FlameHead的add_teeth中,首先通过之前自定义的'lip_outside_ring_upper'和'lip_outside_ring_lower'来在标准模板上构造关于牙齿的顶点,其结果如下图所示:
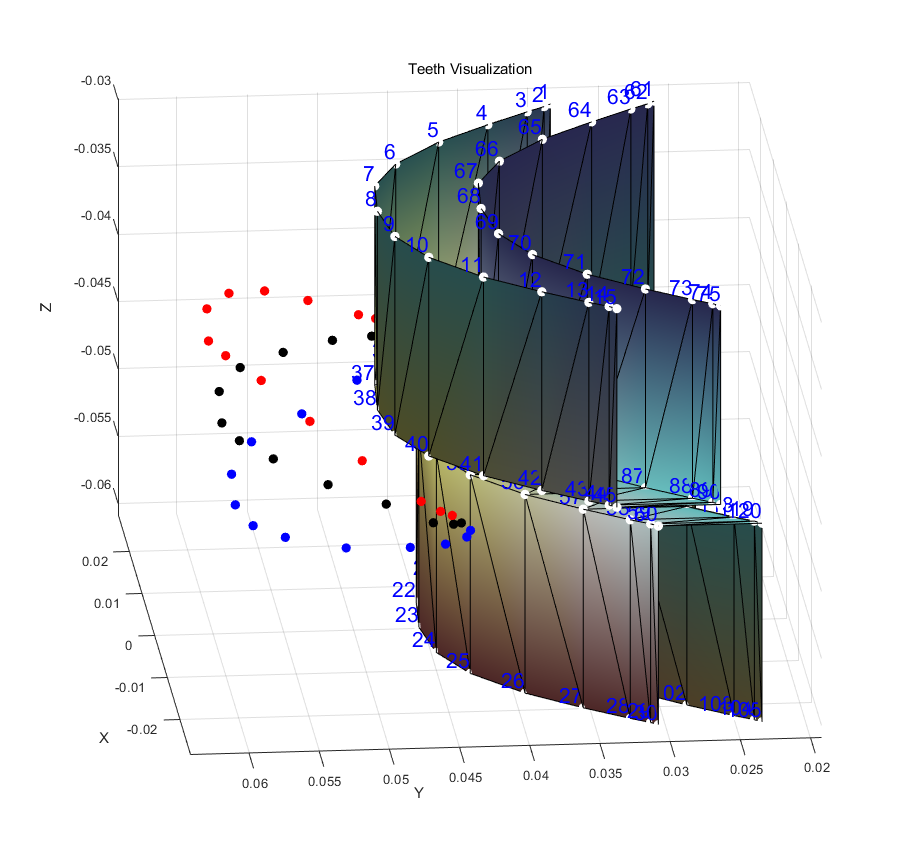
其中红色是v_lip_upper,蓝色是v_lip_lower,黑色是将上下唇顶点求平均得到的v_teeth_middle。通过平移Y轴和Z轴,可以得到右侧所示的八排顶点。
注意在将顶点和后面的各种属性拼进FLAME时,我们都是在末尾追加,这样会带来许多便利,例如landmarks的映射不会被影响等等。
得到顶点只是第一步,除了简单的把顶点拼到标准模板以外,还需要修改FLAME的一系列属性,这样牙齿的顶点才能跟着FLAME一起移动,对于混合形状基$B_E $,考虑将其填充为上下唇顶点对应的基的均值:
1 | # shapedirs copy from lips |
对于$B_P$,可以简单的置零:
1 | # posedirs set to zero |
同样,我们也不希望增加的牙齿影响用于估计结点的回归矩阵$J$:
1 | # J_regressor set to zero |
但对于LBS权重$\mathcal{W}$,我们希望牙齿结点跟着下巴和脖子的转动而转动:
1 | # lbs_weights manually set |
这样解决了顶点本身的一些要求,按照作者在嘴唇处标记的点的数量,我们一共会为牙齿增加$15\times4\times2=120$个顶点。下面就是要给增加的顶点补拓扑。我们需要追加面片和纹理坐标的关系,对于面片,我们只需要把增加的点按顺序连在一起就好:
1 | # add faces for teeth |
这个逻辑是直接的,如果担心写错了其实也可以把顶点导出来,然后在blender里手动标。
对于纹理坐标,作者的处理比较草率,因为那样做也完全够用了:
1 | # construct uv vertices for teeth |
手动选出UV layout里的空余的地方,然后用meshgrid做一下网格,就可以了。最后更新了面和纹理坐标以后,再用之前的逻辑(process_vertex_mask等)更新一下mask:
1 | self.faces = torch.cat([self.faces, f_teeth_upper+num_verts_orig, f_teeth_lower+num_verts_orig], dim=0) |
这样就完成了给FLAME里加牙齿的壮举!
Laplacian Matrix
另一个操作是拉普拉斯矩阵$L$,这个矩阵往往用来平滑mesh。在图论中对该矩阵的定义为:
其中$D$是度矩阵,$A$是邻接矩阵(如果顶点之间有相连,则为1,否则为0)。在该定义下的拉普拉斯矩阵可以写作:
然而在PyTorch3D中,拉普拉斯矩阵的定义为:
这个矩阵实际上是:
这样归一化拉普拉斯矩阵,是为了适配对mesh的操作。例如在一个单独的三角面片上,可以有:
我们可以计算:
那么给定对应的顶点$V=[v_0,v_1,v_2]$,那么作矩阵乘法$\hat{L}V$,会得到:
这个结果实际上以$1/\mathrm{deg}(i)$的权值来描述了对应顶点和其周围点的加权值之间的差。在PyTorch3D中,这被直接用来优化,即pytorch3d.loss.mesh_laplacian_smoothing。在调用这个正则项时,每次都会重新计算一次拉普拉斯矩阵。对于FLAME/SMPL等拓扑固定的情况来说,这是没有必要的。我们总可以预先计算好拉普拉斯矩阵:
1 | # laplacian matrix |
我们注意到了上述矩阵的另一个变种laplacian_matrix_negate_diag,他其实是将主对角线从-1调整成1。这样操作的矩阵可以用于模拟一些类似扩散的平滑。因为此时矩阵乘出来的将是周围顶点的加权和与顶点自身的和(而不是差)。
在VHAP中计算的拉普拉斯平滑实际上是:
1 | def compute_laplacian_smoothing_loss(self, verts, offset_verts): |
这个损失用于对齐“有offset的FLAME曲面的变化”与“无offset的FLAME曲面的变化”,并不是单纯的让曲面变得平滑。
Monocular Video Datasets
当构造好FlameHead,完成FlameTracker的构造方法后,GlobalTracker会先初始化数据集。对于单目视频,会调用vhap/data/video_dataset.py里的VideoDataset。这个类的作用是将预处理得到的图片,mask和landmark都打包好,并且为单目视频初始化一个相机位姿:
1 | def load_camera_params(self): |
正常情况下self.cfg.target_extrinsic_type都是w2c,因为实际上w2c才是相机外参(extrinsic),c2w是相机位姿(pose)。这段代码会初始化一个这样的相机模型:
相机外参和内参会在后面的优化中被调整。特别的是,在这个类的实现里有这么一个函数成员吸引了我的注意力:
1 | def define_properties(self): |
因为在很多时候,我们编写炼丹代码都会有一些类似保存snapshot的需求,比如训练每隔若干iteration保存一些中间结果。如果做的任务对这种保存的需求比较固定,比如生成图像之类的,那可能这样还好。但对于3DV里的任务,可能我们想保存图片就有很多种,更别说还可能希望保存视频,mesh,点云之类的多种“media”。我之前写的时候没意识到这种定义一个self.properties的行为,如果这样做了,会带来很多的便利,例如我们可以在trainer里写这样一个字典,专门管理要保存的各种路径,前缀等。这样就避免了在保存snapshot的工具函数中频繁出现hard-code的路径。
后面还有一个小细节我很喜欢,就是这样来实现张量的一个常见操作:
2
3
4
5
6
7
8
def to_batch(x, indices):
return torch.stack([x[i] for i in indices])
def repeat_n_times(x: torch.Tensor, n: int):
"""Expand a tensor from shape [F, ...] to [F*n, ...]"""
return x.unsqueeze(1).repeat_interleave(n, dim=1).reshape(-1, *x.shape[1:])在炼丹里,张量矩阵有1没1是个很烦的事情,这样相比于
value.unsqueeze(0)等写法要优雅多了。
Optimization
在GlobalTracker的构造方法里,init_params初始化了需要优化的变量:
1 | def init_params(self): |
在单目视频优化的配置里,有一些值得注意的事项。
对于
self.shape和self.expr,VHAP和INSTA tracker一样,都是用了所有的FLAME系数(n_shape为300,n_expr为100)。而基于DECA的tracker由于训练DECA时只选取了一些主成分(n_shape为100,n_expr为50),所以精度略差一些。其标记为’rigid pose’的
self.rotation和self.translation,描述的是FLAME的全局旋转和平移。对于旋转,实际上就是根结点的旋转,也是用轴角式来表示。而平移self.translation会在FLAME做完LBS后施加给所有顶点。FLAME官方曾为FLAME制作了一个简易的纹理空间,对应在上边代码里的即是
self.tex_pca。VHAP里为了更好的photometric loss,并没有用这个简易的纹理空间,其使用的是self.tex_extra,作者手工构造了一个平均纹理,然后在后面逐像素的来优化这张图纹理图。代码里使用的self.tex_extra实际是在平均纹理上学习的残差。这里
self.lights用二阶球谐来模拟打光,这个参数作用于渲染后端(默认的是nvdiffrast)。注意一阶光照被初始化为了$\sqrt{4\pi}$,这是为了总能量的归一化,考虑球谐光照中的光照强度:而$Y_{0}^{0}\left( \theta ,\phi \right) =\sqrt{\frac{1}{4\pi}}$,所以为了能量的归一化,$c_{0,0}$即取为$\sqrt{4\pi}$。
参数中有两项可学习的offset,即
static_offset和dynamic_offset。这两种offset都是3自由度的,用于在FLAME曲面的基础上学习头发等结构。所谓dynamic_offset是说对于每一个帧,都学习一组offset,用于实现更好的追踪结果。单目视频的输入下,
self.calibrated是False,因为单目视频里其实不存在相机标定。所以这里会将相机焦距作为可学习的参数,至于相机位姿就仍然用默认值,即相机不动,用self.rotation和self.translation来表示人头的刚体变换。VHAP采用基于球谐的漫反射光照模型,这个并不是特别显然,这里我们稍作解释。在标准情形下,漫反射光照的计算公式为:
其中$\mathrm{p}$是空间中用于着色的某个点,$\omega_0$是视线方向,$\omega_i$是入射光方向,$N_p$为$\mathrm{p}$处法线。但考虑环境光,我们可以认为光源无限远,从而忽略待着色点的位置$\mathrm{p}$以及观察方向$\omega_0$(由于光源无限远,我们总是可以认为着色点位置位于中心)。这样漫反射光照就简化为了:
那么一个直接的做法就是用球谐函数来构造右边的球面积分:
所以在代码里的实现是:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34def get_SH_shading(normals, sh_coefficients, sh_const):
"""
:param normals: shape N, H, W, K, 3
:param sh_coefficients: shape N, 9, 3
:return:
"""
N = normals
# compute sh basis function values of shape [N, H, W, K, 9]
sh = torch.stack(
[
N[..., 0] * 0.0 + 1.0,
N[..., 0],
N[..., 1],
N[..., 2],
N[..., 0] * N[..., 1],
N[..., 0] * N[..., 2],
N[..., 1] * N[..., 2],
N[..., 0] ** 2 - N[..., 1] ** 2,
3 * (N[..., 2] ** 2) - 1,
],
dim=-1,
)
sh = sh * sh_const[None, None, None, :].to(sh.device)
# shape [N, H, W, K, 9, 1]
sh = sh[..., None]
# shape [N, H, W, K, 9, 3]
sh_coefficients = sh_coefficients[:, None, None, :, :]
# shape after linear combination [N, H, W, K, 3]
shading = torch.sum(sh_coefficients * sh, dim=3)
return shading
...
diffuse = get_SH_shading(normal, self.lights, self.sh_const)
...
rgb = albedo * diffuse在优化时,我们会优化
self.lights来拟合光照,因为我们一开始并不知道环境光具体是怎么样的。但值得一提的是,在经典的图形学管线中,我们往往是先知道环境光的贴图(所谓“天空球”,“天空盒”),然后想从贴图里拿到环境光。球谐函数对于这个目的也有着优越的性质,考虑到$L(\omega_i)$和$N\cdot \omega_i$都是关于$\omega_i$的函数,并且$\omega_i$是在球坐标系上采样的。可以很自然的对这两个函数进行球谐展开(为了不至混淆,我们省去$\omega_i$的下标$i$):
带入$L(N)$中,由于球谐函数的正交性:
而系数$l_i$和$m_i$是方便计算的:
上述球面积分可以在天空球/盒上做蒙特卡洛采样进行计算。
在后面真正优化的时候,作者做了更加细节的处理,堪称艺术!我们整体地看一下:
1 | def optimize(self): |
整个优化过程分为逐帧(sequential)优化和全局(global)优化两大块。逐帧优化时逐张图片进行优化,当完成逐帧优化后,再打乱整个数据集,随机一些图片进行优化。训练分为若干stage:
1 | def optimize_stage( |
不同的stage有不同的优化策略:
1 | PipelineConfig( |
当优化开始时,我们先进行逐帧优化,一开始时间戳是第零帧。我们依次进行了lmk_init_rigid和lmk_init_all两个阶段的优化。根据optimizable_params的不同,一开始我们只通过关键点损失来优化'cam'和'pose'(焦距,根节点的旋转和平移)。然后再加上对形状,表情,姿态的优化。其中有一个参数是disable_jawline_landmarks,当其为True时,计算关键点损失时会将脸颊边缘处的18个点移除,因为这些点往往准确率比较差。这个设置在单目条件下并没有真的起效,而在多视点的情况下被启用了。这可能是由于多视角下的关键点检测会存在歧义。
通过这两个阶段,我们可以在第零帧里构造一个稳定的初始状态。在一般情况下,self.cfg.exp.photometric和self.cfg.model.use_static_offset都是True,所以接下来还会初始化rgb_init_texture,rgb_init_all和rgb_init_offset。在关于光度损失的配置里,我们会注意到align_texture_except和align_boundary_except,这两个tuple也非常的细节。在优化光度损失时,会有:
1 | align_texture_except_fid = self.flame.mask.get_fid_by_region( |
这样来得到两组索引,这两组索引在vhap/util/render_nvdiffrast.py中的NVDiffRendered类里被用到,具体是在其render_rgba函数中:
1 | # ---- uv-space attributes ---- |
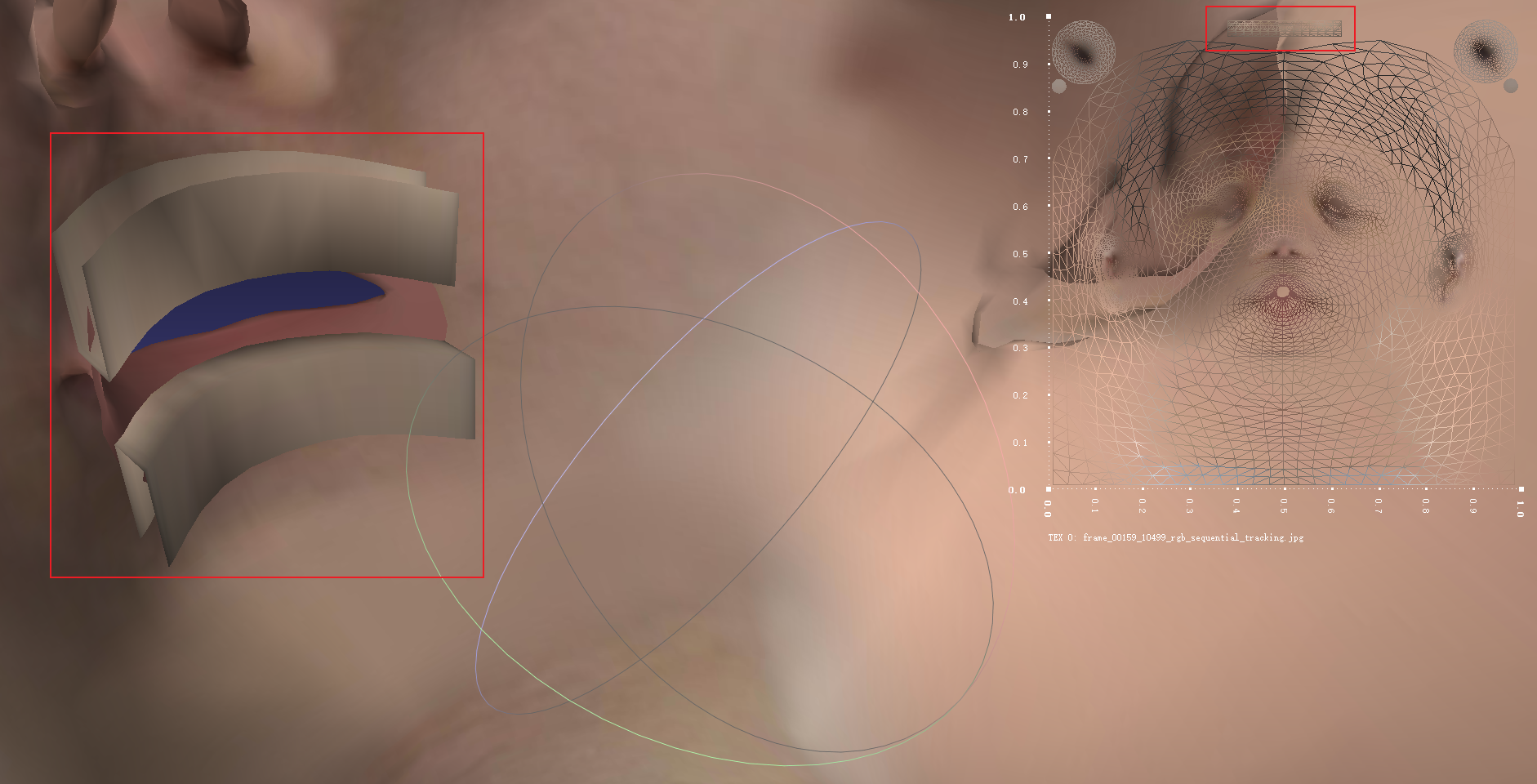
被这两组索引选中的面片和顶点将会被detach。这非常的自然,在刚开始优化纹理的时候,我们不希望头发处的offset开始移动,因为此时的光度损失并不准。由于此时FLAME的位置基本是被校准的,所以('hair', 'boundary', 'neck')三个区域被detach,从而使rgb_init_texture阶段纹理图专注于拟合脸部外貌,同时顶点的('hair', 'boundary')也被屏蔽,使得此时先不要学习头发处的几何。之后在rgb_init_offset阶段,align_boundary_except中的'hair'被移除,并且optimizable_params追加了static_offset,允许顶点开始拟合头部几何。为了更好的理解整个过程,且看此图:
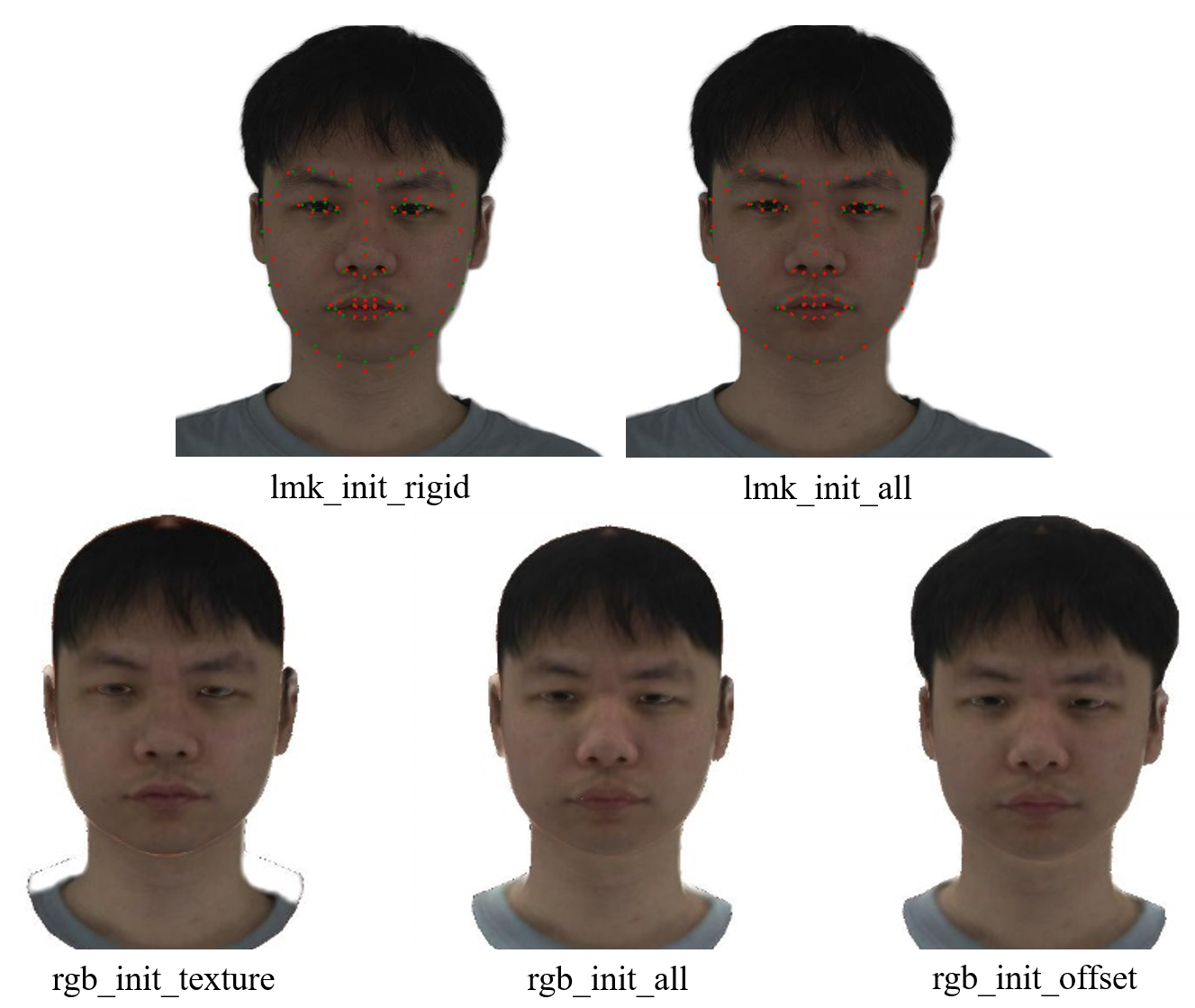
如图所示,在lmk_init_rigid阶段,会先进行关键点的策略对齐。绿色是脸部检测器检测出的关键点,红色是FLAME反投影出的关键点。一开始只优化了相机和全局的刚体变换,对齐的并不好。然后在lmk_init_all阶段,优化了FLAME的形状系数,表情系数,关键点变得更加对齐。然后在rgb_init_texture阶段,纹理得到了初步的优化。由于此时align_boundary_except=('hair', 'boundary'),由于'boundary'处的顶点被detach,此时脖子处有一些伪影。在rgb_init_all阶段,boundary变成了bottomline,脖子部分的伪影得到了优化。最后在rgb_init_offset阶段,在先前良好初始化的情况下,我们优化出了头发的几何。
注意,在后续的逐帧优化
rgb_sequential_tracking时,static_offset并没有被优化。如果逐帧优化时同时优化偏移量,会干扰形状,表情等系数的拟合。
在optimize_stage函数的开始,会用self.configure_optimizer来定义优化器。如果是逐帧优化,那么每一帧的优化器都是新创建的,如果是全局优化,那么优化时一直维护同一个优化器。优化器采用的是经典的Adam优化器,默认(对于形状,纹理,全局旋转,左右眼球,下颚,脖子)的学习率为$5e^{-3}$,对于其他一些待优化的量的学习率被精心调整。
| Variables | Learning rate | Variables | Learning rate |
|---|---|---|---|
| translation | $1e^{-3}$ | dynamic offset | $5e^{-4}$ |
| expression | $5e^{-2}$ | camera | $5e^{-3}$ |
| static offset | $5e^{-4}$ | light | $5e^{-3}$ |
当进行逐帧优化时,对于那些需要逐帧优化的系数(例如表情),第$i$帧时的参数将从第$i-1$帧继承:
1 | def initialize_next_timtestep(self, timestep): |
Loss Function
现在我们单列一小节来细数VHAP里用到的损失函数,其基本就是关键点损失,光度损失,以及(致死量的)正则项。
landmark loss
VHAP在关键点损失$\mathcal{L} _{landmarks}$里加入了先前提到的对脸颊的考虑:
1 | if not self.cfg.w.always_enable_jawline_landmarks and disable_jawline_landmarks: |
当always_enable_jawline_landmarks为True时,计算关键点时会将鼻子附近的关键点的置信度拉大(其实这已经算某种变相的disable_jawline_landmarks了)。这一定程度上也避免了错误的关键点对优化的影响。值得注意的是,在计算loss时,人脸检测器对每个关键点的置信度也作为权重纳入了计算:
1 | lmk_loss = torch.norm(diff, dim=2, p=1) * confidence |
VHAP中为计算landmark提供了两个后端,一个是常用的face_alignment,另一个是STAR。后者精度高一些。
photometric loss
在VHAP中采用$L_1$损失作为光度损失$\mathcal{L} _{photo}$,并没有采用蒙皮损失(silhouette loss):
1 | pred_rgb = render_out['rgba'][:, :3] |
regularization terms
针对全局旋转和平移,有平滑项来令第$i$帧的旋转与平移与第$i-1$帧的均方损失最小:
实际上,从代码痕迹里可以感觉出来,作者一开始是希望在逐帧优化时保证第$i$帧和第$i-1$帧的连续性,然后在全局优化时再保证第$i$帧和第$i-1$,第$i+1$的连续性。但这个设置最后没有实装。
对于FLAME的剩下的四个结点(脖子,下颚,左右眼),作者在$L_2$正则化的基础上给每个部位增加了额外的正则项:
对于下颚,额外惩罚了沿$x$轴负方向(即下颚向上颚方向旋转)和沿$y$轴$z$轴的旋转;对于左右眼球,额外惩罚了左右眼姿态估计的不一致。同样,针对结点的姿态也有平滑项:
对于表情,也存在正则项$\mathcal{R}_{expr}$和平滑项$\mathcal{E}_{expr}$:
对于形状,存在正则项$\mathcal{R}_{shape}$:
对于纹理图,我们这里优化的是逐像素的纹理图而不是FLAME提供的纹理空间,作者施加了变分损失来迫使纹理图变得光滑:
$\mathcal{T}$是学习到的残差纹理图,对于牙齿和巩膜(即眼白,sclera,是的没错,在这里你甚至可以学到生理学知识),作者为这些区域的纹理额外施加了$L_2$正则项:
这样保证在优化过程中这两个细节的部位不会被劣化(实际上牙齿和眼白的颜色沿用平均材质一点问题都没有,这还到不了那么细致的程度)。
对于光照,我们同时将球谐系数约束在均匀光照,同时施加正则项来保持着色出的漫反射材质的合理性:
这里$\mathcal{D}$是渲染出的漫反射图,他具有三个通道。$\mathrm{var}(\mathcal{D})$的操作是求取其逐通道的方差,然后求平均。通过对通道间方差进行惩罚,提高打光的稳定性。值得注意的是$\mathcal{D}$的正则项是纯粹针对球谐系数的,跟法线无关:
1 | # ---- shading ----a |
这里diffuse_detach_normal是用于计算正则项的$\mathcal{D}$,这是很直接的,因为在优化环境光时我们不希望其影响几何。
接下来是对于顶点位置的各种正则项,第一项是拉普拉斯平滑,如前文所说,其迫使施加了offset $d$的mesh和没施加前的具有相似的局部性质:
其中$v_{w/o}$是没有offset的顶点,它是由当前顶点$v$减去offset $d$得到的。我们不希望执行平滑时影响FLAME本身的形状,所以$v_{w/o}$在计算平滑项时也做了detach()。拉普拉斯平滑并没有被施加到所有部位,self.cfg.w.reg_offset_lap_relax_for标记出了hair和ears两个区域。在这两个区域拉普拉斯平滑的强度会被缩放0.1倍。
第二项是对偏移的$L_1$正则项,用于让offset不要过大:
这个正则项均匀地施加到了所有顶点上,虽然代码里也实现了对不同区域作用不同正则强度的机制,但对于这一项,强度缩放倍数均是1。
第三项是对于特定区域的刚性正则项,它用于让一些区域的偏移尽可能均匀:
计算的方差是关于顶点的方差,得到特定区域若干顶点在$x,y,z$三个方向上偏移的波动,然后再平均,作为待优化的正则项。作者在left_ear,right_ear,neck,left_eye,right_eye,lips_tight六个区域施加了这一正则项。这非常的合理,因为在一般的优化中,这几个部位的几何往往会被附近的结构“淹没”,因为这几个区域往往都比较小并且不易被监督到。
最后针对逐帧的dynamic_offset(如果用到了),作者也施加了平滑项,平滑项不仅约束帧间的变化,还约束第$i$帧跟第$0$帧的变化,防止几何随时间的漂变:
Total
可以看出,作者为了优化过程的顺利进行,设计了相当多的正则项,并且还细节考虑了在哪些地方进行detach()。更加艰巨的任务是给每个优化项准备合适的权重,在单目情形下,总的损失函数为:
调出这些超参需要丰富的经验……我根本想象不到他们花了多久调出来的,以及他们有多少计算资源。
在多视点数据集的情况下,权重会发生一些改变。具体来说,多视点的数据集中,关键点的监督会存在误差,所以关键点对齐的权重会被调低;当存在多个相机位姿时,有必要在一个batch内优化所有位姿,但这样会导致变分损失过平滑(类比于标准炼丹中的batchsize变大,学习率也应该跟着变大),所以变分损失的权重也应该拉大;最后一个设置是在多视点下,作者减轻了对表情的正则和平滑,这可能是为了拟合一些夸张表情(另一个角度来看,在多视角下,有着更准确的几何描述,形状和表情解耦的是比较彻底的,对于表情的约束就可以放低一些):
nersemble数据集使用了16个视角,如果自己采集的数据并没有使用那么多视角,应将变分损失的权重再调小。
Nersemble Video Datasets
nersemble是一个经典的多视点数据集,为了能够处理自己的多视点数据集,我们需要了解VHAP中在追踪nersemble时的一些事项。
nersemble数据集在拍摄时,记录了每个相机的颜色校正矩阵,NeRSembleDataset在读取的时候会先根据对应的矩阵进行颜色校正:
1 | def apply_transforms(self, item): |
如果拍摄的数据集之前已经做好了颜色校正,此处可以略去。
多视角下对相机不做任何优化,nersemble读取出来的是w2c,在load_camera_params会将其先处理成c2w,然后进行一些对齐,最后再转回w2c。一个值得提到的对齐操作是:
1 | def align_cameras_to_axes( |
这个对齐是为了将平均相机位姿与世界坐标系对齐。
整个tracker写的“开箱即用”,将数据集按路径准备好了就可以一键启动了。
总的来说,整个tracker实现了针对人头来说非常惊艳的效果。
End
整个项目的实现,完全就像一场“对见习炼丹师进行的指导课”。标准的type hint,规范的doc-string,可扩展性好,方便修改,甚至可以媲美一些由许多人维护的开源炼丹仓库(例如diffuser,transformer)。我起初只是以为我不会做科研,看完了以后我发现我其实连代码也不会写,哪怕是Python。自从入门3D Vision,已经有一年半了,科研上颗粒无收,多少有点麻;然后看了这个项目,我的内心:
“好玩不能当饭吃,要不转Java吧,现在还来得及。”——佚名
回想当时按下推免按钮,“少年轻狂,犹如南柯一梦。”。后来只剩下调了一天camera convention,窝在出租屋蜷着被子刷着手机看见同学该实习的实习,该顶会的顶会,这下更麻了。
算了,扯点别的吧。“我永远喜欢罗小涵!”

