
“雾蒙蒙,城头上,弦月下。”
春节假期快结束了,这篇blog是用来记录一下探索毕设过程中得到的一些认识。我毕设要做的是基于3D Gaussian Splatting实现三维人脸(头)的合成,
我承认,有那么很短的一瞬间,我有过想把EG3D里的Neural Rendering换成Gaussian Splats的想法,做一个generative manner的东西,但只有那么一瞬间,因为太难了。
于是我就瞄准了“从单目视频中重建人头”这个任务,这个直观看起来难度就比较适中了。该任务可以形式化为给定一段单目视频$I=\left\{ I_i \right\} $,相机内参$\mathbf{K}$,如何得到一个“head avatar”。由于人头先前工作的铺垫,往往可以通过先前工作的pretrained,从每一帧中得到FLAME模型中的mesh曲面$M={M_i}$,表情系数$\varPsi =\left\{ \psi _i \right\} $,用于表示该identity的形状系数$\mathcal{S} =\left\{ s_i \right\} $,FLAME的结点的姿态$\varTheta =\left\{ \theta _i \right\} $,根结点的姿态(或者理解为相机外参)$\mathcal{P} =\left\{ P_i \right\} $。这些前人提取prior的成果是使得这个任务变得“可以做”的重要一环。
这个task,对像我这样想入门的人,除了难度适中,还有不少的好处。
- 因为这个任务需要在了解了3DGS以后,做出一个可以deform或者叫dynamic的Gaussian Splatting。和更general的4D-scene reconstruction不同的是,FLAME和有意采集的各种姿势下的人头图片,保证了一个很强的先验,这样做完以后可以用一个GUI界面,来实时的调整一个avatar,这个比较好玩。
- 和用SMPL的人体任务相比,人头相对简单的多,可以借着使用FLAME了解一些在PyTorch中“灵活运用mesh”的艺术。
- 在这个任务里,用来驱动人头的condition比较简单,只是表情系数。有些audio-based的这个就又是另一回事了,在提取condition的时候要多花一些功夫。
- 这个任务是朴素意义上的supervised-learning,数据分布全部来自于拍摄的单目视频,只要专注于fit就好了。像有些任务上需要紧密依赖一个pretrain来监督,这个可能太ambiguous了。
- 而且它是单目的,如果真的多目了,已经有很多有经验的多的人用一堆我来不及学的technique(什么DMTet恢复一个mesh)来做,这个,不太适合入门的人。
- 用Gaussian Splatting做这个任务还没有可用的开源代码(截止到写这篇blog的时候),可以从零搓一遍。
所以在几个月里,我先是学习了3D Gaussian Splatting[post],然后了解了FLAME[post],之后梳理了一下预处理管线[post],最后搓了初步的demo出来。在实际操作阶段,结合实践出的一些现象,再回过头来看用3D Gaussian Splatting实现这一任务的一些工作,有了一些新的理解和启发。
截止到现在,用3D Gaussian实现这个任务有许多工作,但现在都没有开源(有一个是放出了inference部分,另一个是全放出来了,但缺失了一个挺重要的部分,后面会提到)。它们有MonoGaussianAvatar,PSAvatar,HeadGaS,GaussianHead,flashavatar,GaussianAvatar。下面将会简要的指出这些工作里的一些细节,然后进行总结。
在正式切入主题之前,还需要指出关于3D Gaussian Splatting中的一些细节:
对于每一个splat,scale用于调整这个椭球分布在不同方向的长度,最终得到的图像上,有许多高频细节都是需要很多个某一个轴上的scale很大的splat来合成,他们看起来像许多针。这些scale的范围大概在$10^{-5}\sim 10^{-3}$这个量级,这个数值太“subtle”了,这数值甚至有时候都没学习率大。所以在原版3DGS里,用了
torch.exp()来优化在对数尺度下的scale(也就是说大概在$-5\sim-3$这样,这个就是一个对于常规的NN优化时的正常范围了),这个操作有些午夜梦回高中化学选修四——酸碱中和滴定。原版3DGS是为了合成静态场景的,引入球谐系数来实现“颜色随方向变化”的效果。方向由每个点相对此时的相机中心作差获得。相机中心$C$是外参矩阵求逆来的:
优化球谐这个操作可以为颜色提供更大的自由度。通俗的认识是说,这种显式定义的让颜色变化的方法,效果没有MLP+camera pose好,但我推测这里有一些别的原因(见后文)。
所以如果你得到$t$或者$C$以后,然后要做coordinate system convention,一定不要只改R,记得平移向量也要改。
每个高斯点的位置$\mu$在原版3DGS里是可优化的,densification操作靠的是追踪梯度${\mathrm{d}L}/{\mathrm{d}\mu}$。不管是做split还是clone,其实一开始注册的新的位置
new_xyz都是和densify之前的位置是一样的。真正让他们“动”起来的原因是,有一半的参数的grad是None,然而另一半的是loss.backward()出来的有效值,所以那另一半在调用optimizer.step()时,一半的高斯就会借助优化位置$\mu$而移动开。所以这里并没有显式规定“步长”这一概念。
现在切入正题。
MonoGaussianAvatar
这篇工作follow了PointAvatar,作图什么的都存在明显致敬。
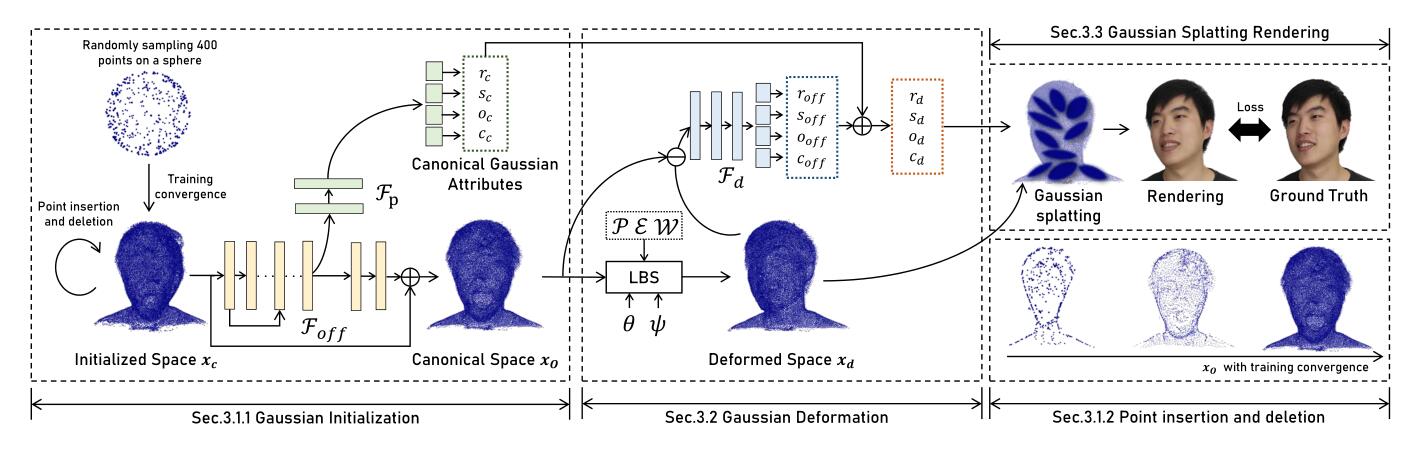
这个流程分为两个阶段,先从一个稀疏的球状点云里,用sphere splat来fit出一个人头形的几何。这个操作大概是直接follow自PointAvatar,用PyTorch3D里的rasterizer实现的。这个fit的过程中,对这些球状的splat,也是要做densify和prune的,prune的机制就是删掉那些不透明度很小的,densify的机制跟3D Gaussian Splatting里的不同,是类比于PointAvatar的,就是在当前点周围,用随机噪声来产生新的点,跟梯度一点关系没有。
然后,得到的这一组点,就固定了,记作canonical space $x_c$,之后进入第二阶段,开始学习Gaussian Splat,点并不会增加和减少,会用MLP来对每一个$x_c$学一组高斯的属性,学一个位置的偏移量$\mathcal{F}_{off}(x_c)$,然后再学一个implicit LBS用于让人头动起来。
这里的问题在于,按照LBS的做法,点动了,高斯本身的旋转$r$是没有动的,这样肯定会导致在一个pose时的解是好的,然后转动到另一个pose后产生模糊的解,所以这里又补了一个Gaussian Deformation Field的MLP,来学高斯属性的偏置$r_{off},s_{off},o_{off},c_{off}$。
其实直觉上,这一步可以用LBS最后得到的旋转变换来直接显式的给出来。因为感觉就只有$r_{off}$的影响是最大的。
这里要注意的一个事情是,这种用MLP学出来的Gaussian Attributes,不一定能对应上这些属性各自的显式的范围,颜色和不透明度好说,都是0到1,用一个Sigmoid()就好了,但scale就不一定了,所以我比较好奇这个工作里的initialized MLP里,为什么$s_c$的激活是Sigmoid(),这样得到一个0~1的值,它不可能满足scale的范围啊,不太清楚了。
以及至于那些偏置$r_{off},s_{off},o_{off},c_{off}$是怎么加的,就更奇怪了。如果按照附录里的图理解,得到的这些偏置也是被激活过的,那直接相加$r_d=r_c+r_{off},s_d=s_c+s_{off},o_d=o_c+o_{off},c_d=c_c+c_{off}$可太奇怪了,比如颜色和不透明度,应该有加出1以外的风险,难道要额外的clamp一下吗?所以我推测应该是把激活前的这些implicit value进行相加。
原文中报告的结果是在100k的$x_c$下取得的,这篇工作对于MLP的输入,也就是那些坐标,没有使用positional encoding,其声称这样是为了得到“较为光滑”的representation,这个操作其实有点反直觉。
在用sphere splat得到$x_c$时,可以看出tune了很久,这说明一个好的$x_c$很重要。
FlashAvatar
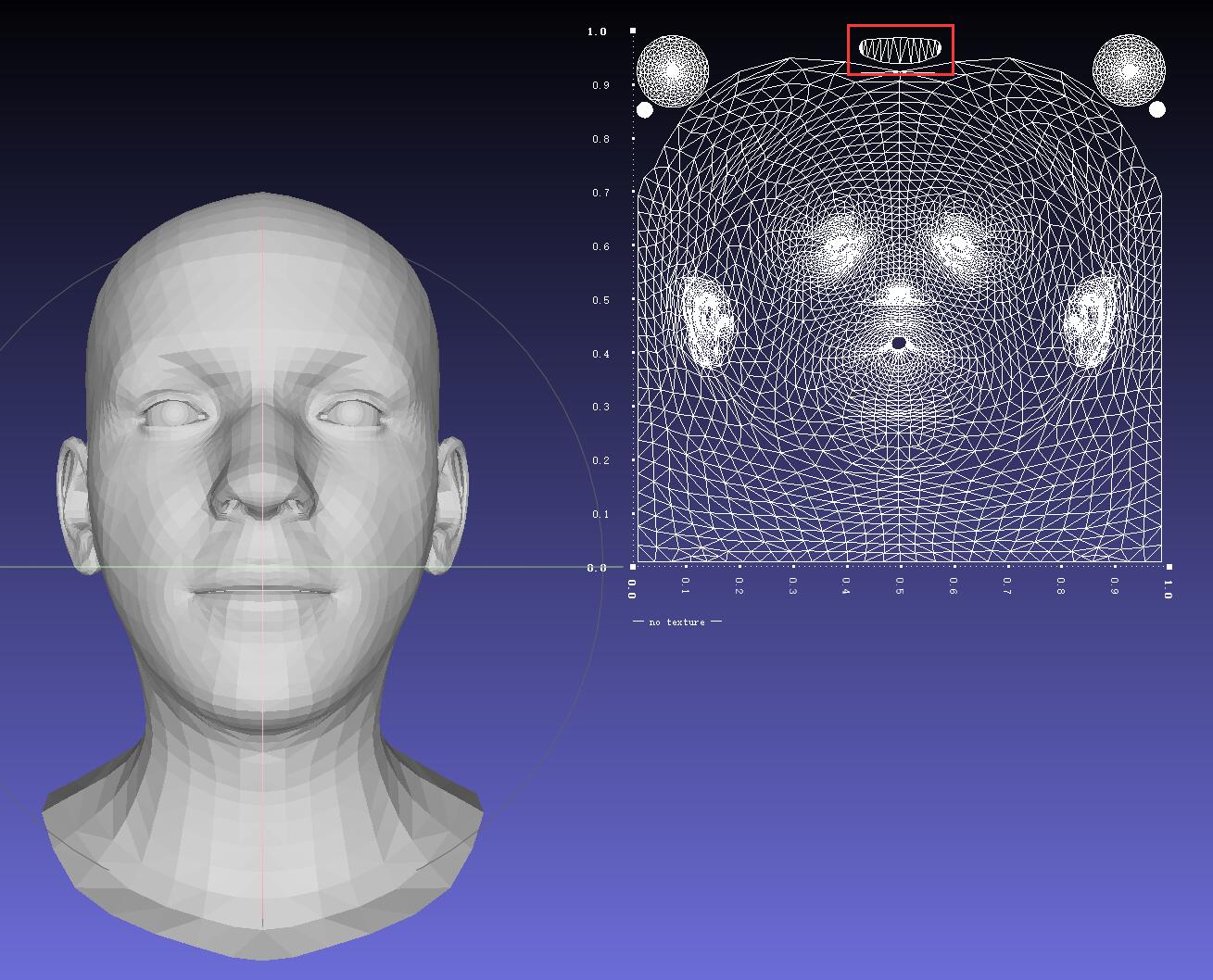
这篇工作在FLAME的纹理上进行均匀的UV sampling,这个操作可以用PyTorch3D的rasterizer顺手返回的bary coords实现。
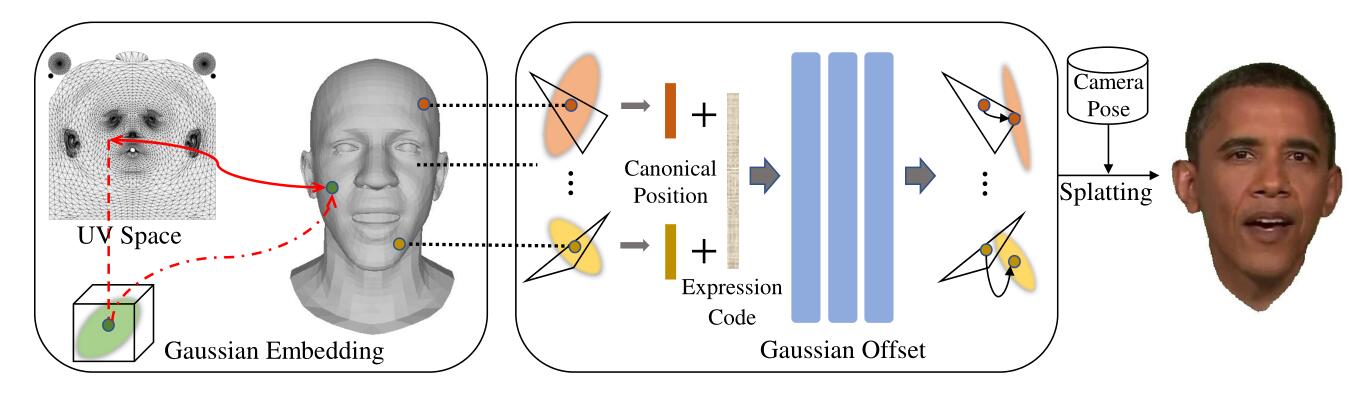
FLAME本身的模板上嘴是不闭合的,所以UV sampling是采不到能表示口腔的那些点的,需要手动的缝一些面。这个操作可以用Blender手工实现,得到一个新的模板。
flashavatar的操作是,对于预处理得到的FLAME下的canonical head,用UV sampling,得到一个模板顶点集$\mu_T$,这个点集是固定的。由于每一帧的mesh曲面$M_i$都已知,所以UV sampling得到的顶点,可以与当前$M_i$上的顶点进行重心插值,得到在这一帧下的位置$\mu_M$。
将$\mu_T$进行位置编码$\gamma(\cdot)$,与FLAME的其他系数一起,送入MLP,得到位置,旋转,缩放的偏移量$\varDelta \mu,\varDelta r, \varDelta s$。此时位置的偏移量$\varDelta \mu$是与$\mu_M$相加,来得到最终的位置。球谐系数和不透明度是各自Gaussian Splat自己point-wise的优化的。
UV sampling是一个很好的操作,因为一般的参数化模型的顶点分布都不太均匀,比如眼球那里有相当多的顶点,多到基于instant-ngp的工作在用FLAME先验之前都要把眼部那里的面简化掉。同时这个操作下对每一帧,有一个很不错的canonical head,很稳定。
我当时觉得这里感觉最不舒服的一点就是$\varDelta \mu ,\varDelta r,\varDelta s=F_{\theta}\left( \gamma \left( \mu _T \right) ,\psi \right) $这种变形的方式,我感觉不如用LBS来引导变形,这样在人头的task里会舒服一些。
按照这篇的做法,只需10k的点数量就能有很高的质量,但我早些时候手搓过一般,没整出来,可能是哪里整的不对了。
GaussianAvatar
这篇工作其实处理的是多目视频条件下的重建,有点黑科技。他们定制化了一个FLAME tracking,让这个tracking能fit出头发形状的mesh,然后在这个mesh的基础上指派高斯点。为了要有牙齿,还手动补了上下牙齿的面,crazy。
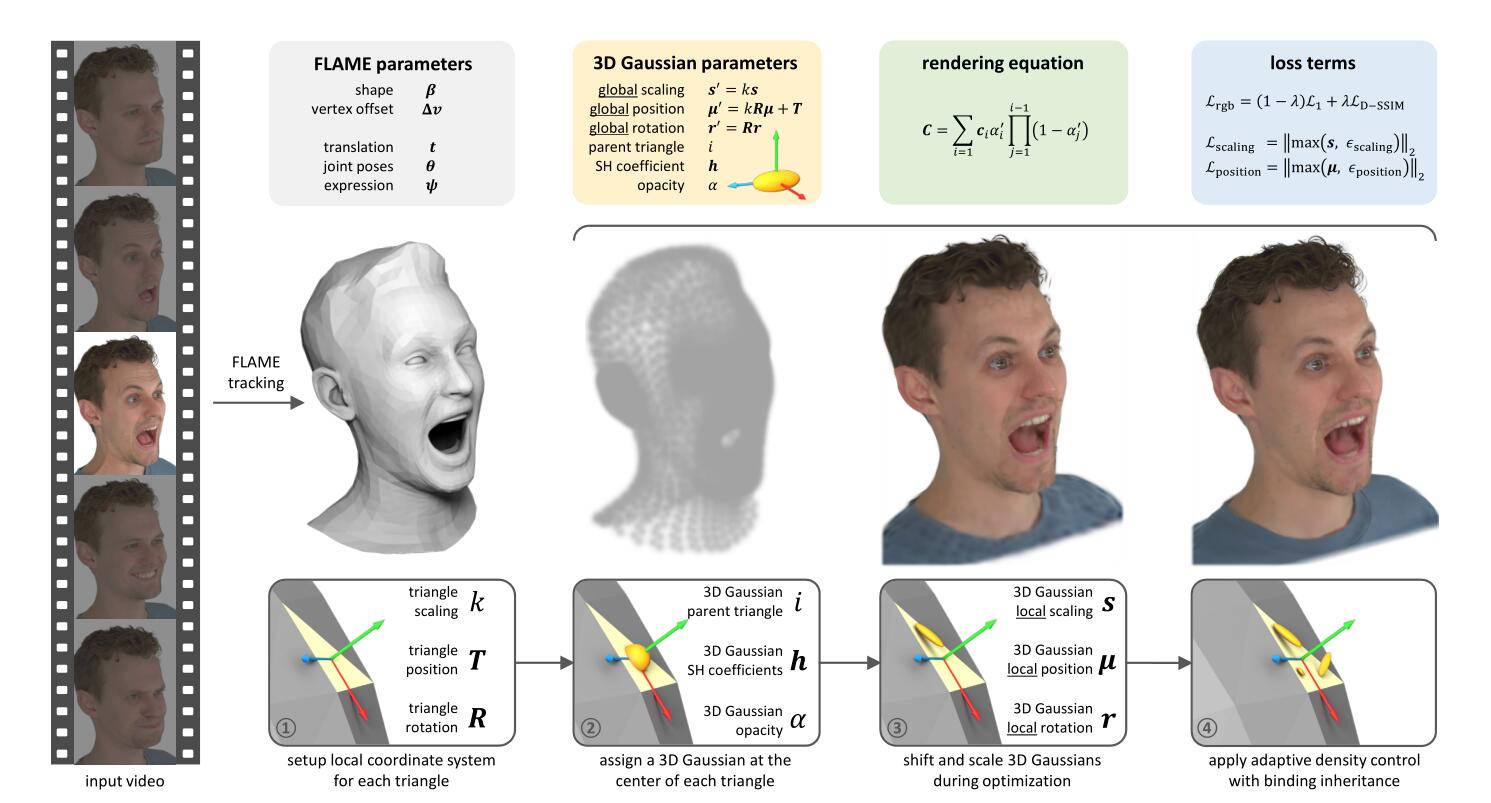
这里把顶点实际上是绑定在了三角面片上,这个实现起来感觉很不容易。每个三角面片都能确定一个坐标系,以其重心位置为中心,可以得到旋转$R$和平移向量$T$。同时,由于在做一些表情时,顶点之间的距离会变,其三角形面积也会变,所以会有一个比例系数$k$来保持局部高斯的不变性。所以整个变换可以导引为:
然后就可以直接训高斯了,还可以直接应用3DGS原版的densification,因为就算有新的点,新的表情,上述线性变换也会忠实的把点映进合适的位置上的。
这篇的代码给出来了,但没有给出来那个神奇的FLAME tracking,所以一键follow是不存在的。
PSAvatar
这篇工作某种意义上很像MonoGaussianAvatar。
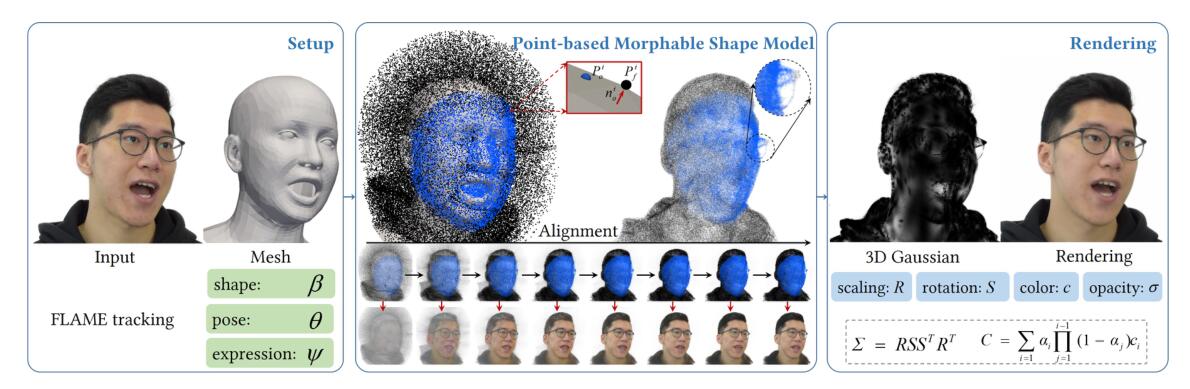
与从400个点生长到一个canonical的人头,这里的办法是先从FLAME的模板顶点中,沿着法线方向,创建新的顶点。然后用这些新的顶点,以他们的面积(PyTorch3D中的mesh_face_areas_normals可以直接算出来)为基准进行加权抽样(torch.multinomial),对得到的索引随机一组重心坐标,来进行采样。最开始用的也是sphere splat,然后得到一个粗糙的点云几何,然后切成gaussian splat进行训练。
我推测在第一步获得那些点的时候,应该没有对其位置进行变化,也就是说又是固定好的了。这一步的好处是,在第二阶段做deformation的时候,LBS要用的基也能用重心插值出来。这样变形可能还差一点,于是又学了一组基向量来修正:
以及这里就是显式给出高斯的旋转的:
整个部件根本没用到NN,很舒适(其实学$\mathcal{P}^{\prime}$和$\mathcal{E}^{\prime}$的过程等价于学一组linear,无activation)。直觉上这个应该需要相当多的点。
HeadGaS
这篇工作的图画的挺随意。
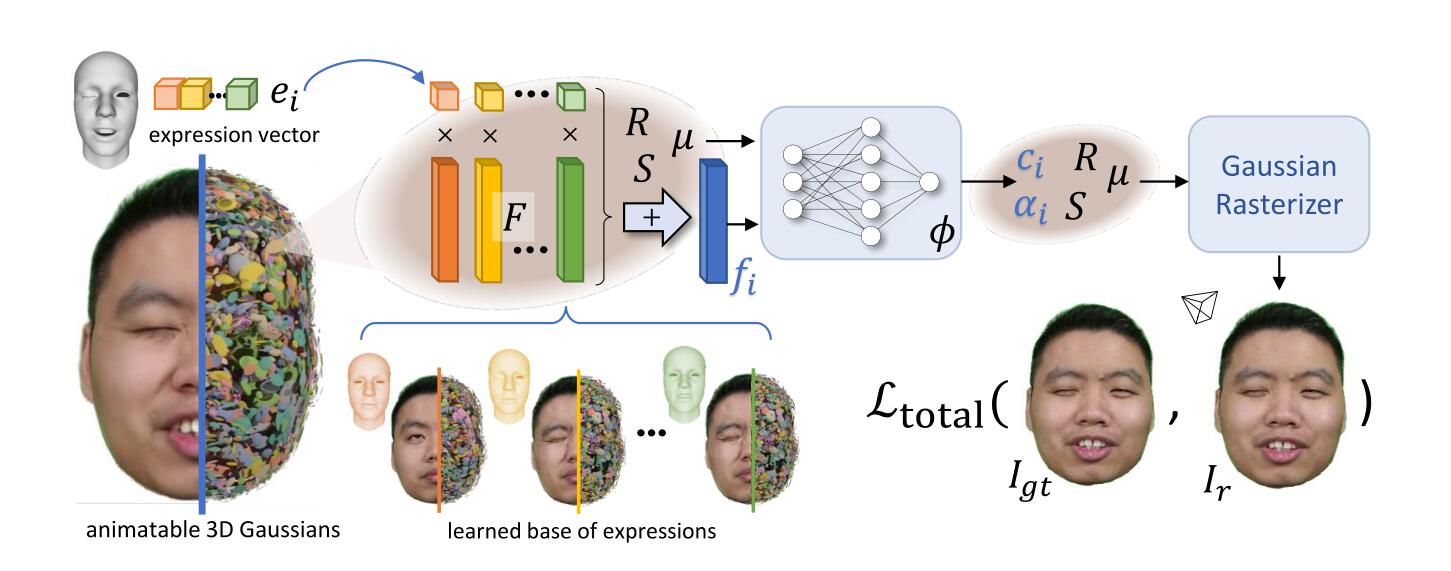
他的操作在于,此时是有表情的基向量和系数的,将基向量当作可学习的参数,然后在给定一组表情系数的情况下,可以合成出一个特征向量$f_i$,然后将其与点的位置拼在一起,输入进一个MLP算出颜色和不透明度。
而高斯的位置,旋转,缩放,全是point-wise的优化的,然后高斯的点随意的densification。
所以,这种做法是舍弃了几何来换取变形。在不同表情的驱动下,MLP会产生不同的颜色和不透明度,然后他们会渲染出不同的样子,但不同的表情下,高斯的几何(位置,缩放,旋转)这些却都是固定的。
值得一提的是,在这个工作的附录里,做了一个消融实验。假如我们认定这个消融实验是客观的,那会带来一些观察。作者比较了三种设定下,推理时间,PSNR,和高斯点数量的变化,我比较关心高斯点数量的变化。
第一个是不用所谓的“feature blending”,也就是输入MLP的是点的位置和表情系数,然后输出颜色和不透明度,这个需要135k个高斯点。第二个是将预测的对象从颜色和不透明度换成$\varDelta \mu$和$R$,这需要更多的高斯点,234k个。最后一个是将MLP撤掉,然后用一种比较朴素的办法,对颜色和不透明度进行加权,最终需要295k个点。然而他们的settings下只需要28k个点。
GaussianHead
这篇工作其实也是牺牲掉几何的一个做法。
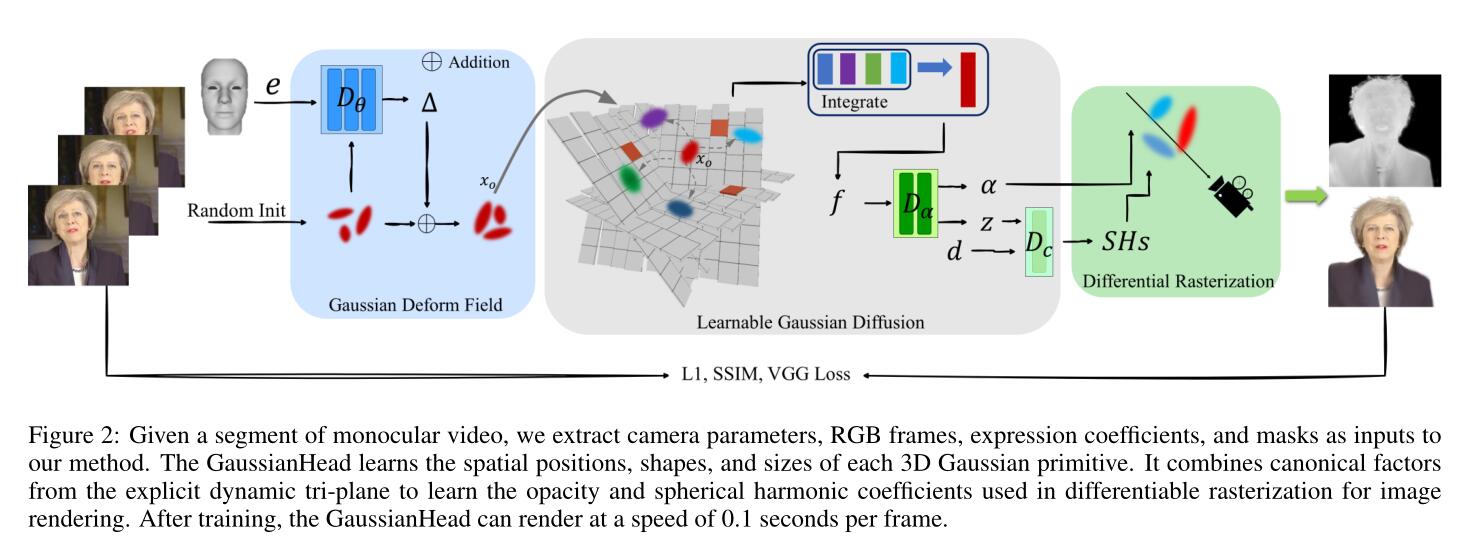
他先用表情系数作为condition,然后学一个几何的偏置$(\varDelta \mu ,\varDelta r,\varDelta s)$。然后将加上偏置以后的高斯点的这个坐标,投影到可以旋转的triplane(这是一篇ICLR里做的工作),然后抽出特征向量,再用别的MLP解算坐标和不透明度,然后得到所有属性后,进行光栅化。
这个工作也支持随意的densification。
这篇工作放出来了一个ckpt,可以打开其中保存为.ply的文件:
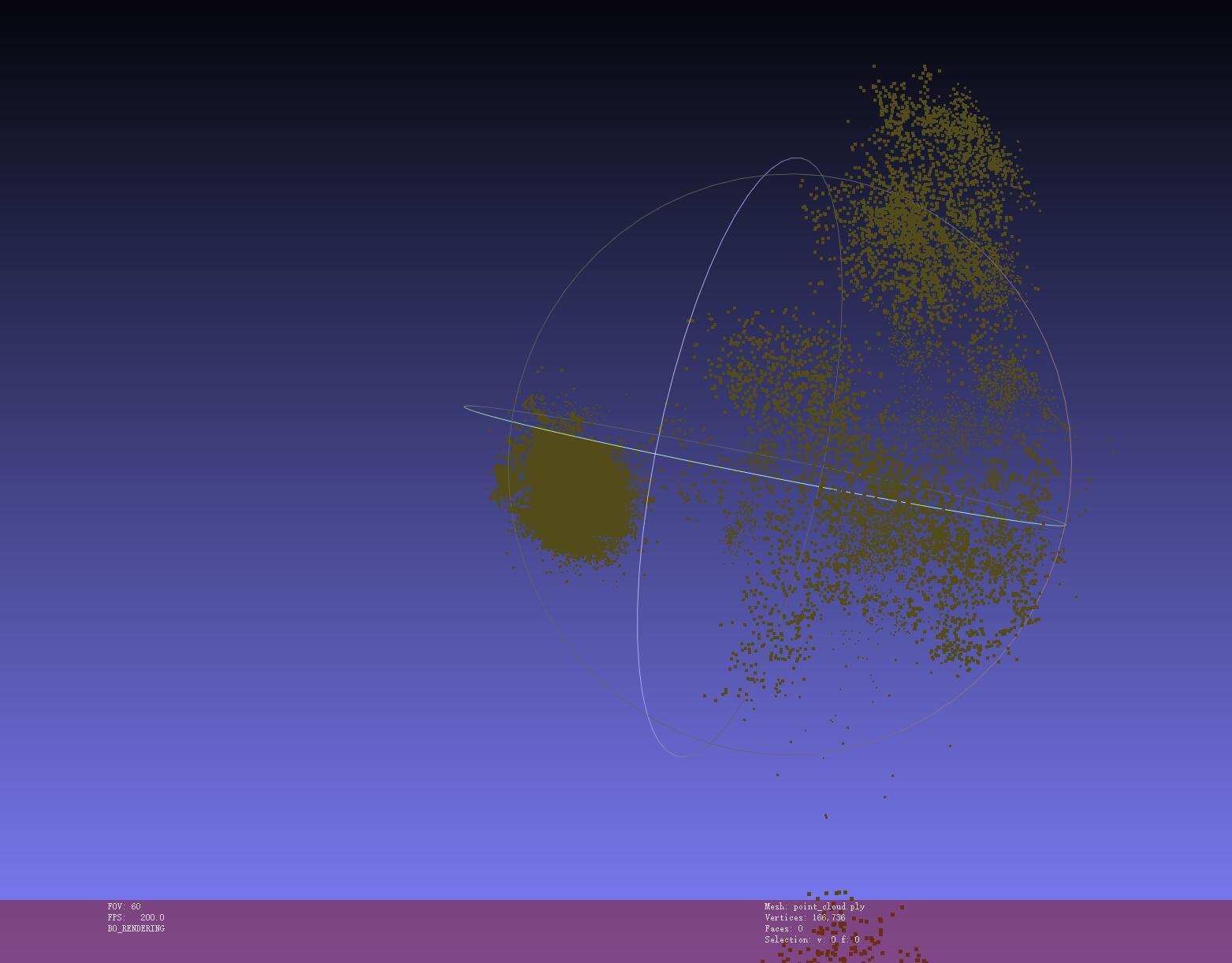
可以看见这个点云与人头相差甚远。
这里引入的可旋转的triplane,是一种很有意思的结构。因为triplane本身是没有归纳偏置的,比如对于其中一个面,一个点投影下去,其得到的$f_{i,j}$只和周围四个点有关。有一篇工作PET-NeuS讨论了一下这个事情,挺有意思的。
Summary
呼~
所以可以看出来,这6个工作里,前四个是一类,后两个是一类。他们都是很好的工作,下面所说的内容只是我个人看法和情感。
前四个工作是围绕FLAME的几何进行操作的,核心在于一个好的canonical space。然后在这个canonical space的基础上学deform。后两个工作,其实更像“借着快速光栅化”的NeRF。
这背后是显式的point-wise和用MLP隐式优化的区别,我们做一些不严谨的符号计算来说明这个事情。在此之前,我们最好把Gaussian Splatting说的更加透彻一些。假定一个像素的值是由$N$个splats合成的,那么根据体渲染:
这里索引下标从小到大就认为是tile sorting后的索引了,根据Gaussian Splat的定义,$\alpha_n$来自于:
这里$\mathrm{p}_{i}$表示该像素的坐标,$\mu _{n}^{\prime}$是投影到2D-space中的高斯点位置。考虑颜色的梯度(为了简洁,忽略RGB三通道的记号了),这个的计算比较简单:
然后是不透明度:
注意$\alpha_n$在大于$n$的$T_{i}$中也会出现,所以:
由上面$\alpha_n$和$o_n$的关系,可以得到:
于是$\frac{\partial \mathcal{L}}{\partial o_n}$就得到了。
接下来,我们记上式中的指数中的项为$\sigma_n$,这一项提供了对几何属性的梯度:
所以式子可以简化为:
在接下来推到关于几何属性的梯度时,我们先回忆在前向过程中,Gaussian Splatting中的位置$\mu$是先将世界坐标系转换到相机坐标系下,然后还在代码里作了一次透视变换把点都规正到NDC space中,最后再做那个投影变换的一阶近似的。
所以其实所有高斯点都是被normalized到NDC空间中的,我们操作的scale和rotation也是在NDC空间中的。
记相机外参为$T_{c}$,NDC变换矩阵为$P$:
我们就不用专门的字母表示相机内参了,相机内参中的焦距,主点,就直接用$f_x,f_y,c_x,c_y$表示了。$n$表示near,$f$表示far,这些在3DGS里分别取为0.01和100.0了。$w$和$h$是输出图片的尺寸。
但原版3DGS其实没有用相机主点……
所以对于位置$\mu$的变换即为这三步:
最后一步是将$[-1,1]$的NDC空间中的点变换到像素空间中。参见cuda_rasterizer/auxiliary.h中的ndc2pix:
1 | __forceinline__ __device__ float ndc2Pix(float v, int S) |
写成矩阵应该是:
然后为了让投影变换后的高斯保形,对于$\Sigma$所做的投影变换的一阶近似$J$为:
因为根本用不到第三行,于是就$J\in\mathbb{R}^{2\times3}$了,所以对于$\Sigma$有:
所以回到$\alpha _n=o_n\cdot \exp \left( -\sigma _n \right) $,有:
接下来我们计算$\sigma_{n}$与$\Sigma^{\prime}$和$\mu^{\prime}$的关系:
然后这个逆矩阵不是很好处理,我们直接掏出matrix cookbook,可以得到:
所以就有:
所以现在我们通过设定为高斯分布的不透明度的计算,已经将chain延申到了2D的screenspace中了。
“只要不停下来,道路就会不断延伸。”
我们先解决好处理的部分,由于:
所以我们两边求取微分,可以得到:
然后至于协方差矩阵$\Sigma$和旋转四元数$q_n$和缩放$s_n$的关系,在这篇blog的最后是推导过的,所以关于旋转和缩放的反向传播的计算图,我们就有了:
这里$M$即为协方差矩阵$\Sigma$的Cholesky分解,$\bar{q}$是归一化后的四元数。
对于缩放,道理是一样的:
为了身心健康,这里就不把每一项带入了。
现在,就差关于位置$\mu$的偏导了。我们要注意到,在二次型$-\frac{1}{2}\left( \mathrm{p}_i-\mu _{n}^{\prime} \right) ^T\Sigma _{n}^{\prime}\left( \mathrm{p}_i-\mu _{n}^{\prime} \right) $中,不仅$\mu _{n}^{\prime}$跟位置有关,$\Sigma _{n}^{\prime}$也和位置有关。因为雅可比阵$J$。所以:
然后,我们计算:
这个式子中的两项都不能写成很整洁的形式,我们记$T=JR_c\in\mathbb{R}^{2\times3}$,我们可以将$\Sigma ^{\prime}=JR_c\Sigma R_{c}^{T}J^T$打开:
一个不需要借助其他数学工具(如将矩阵展成Frobenius内积来表达矩阵求导)的理解思路是,假设我们根据前面的计算已经得到了$\frac{\partial \mathcal{L}}{\partial \Sigma _{_{00}}^{\prime}},\frac{\partial \mathcal{L}}{\partial \Sigma _{01}^{\prime}}\left( \frac{\partial \mathcal{L}}{\partial \Sigma _{10}^{\prime}} \right) ,\frac{\partial \mathcal{L}}{\partial \Sigma _{11}^{\prime}}$,根据多元函数微积分:
然后根据上面展开的结果逐项求导,这其实也正是3DGS中CUDA代码的来源,然后再用$T=JR_c$如法炮制一遍就好了,对应diff-gaussian-rasterization/cuda_rasterizer/backward.cu中的:
1 | // Gradients of loss w.r.t. upper 2x3 portion of intermediate matrix T |
于是对于$\frac{\partial \sigma _n}{\partial t_n}$我们就有了答案:
由于$t_n$是经过相机变换过的,有$\frac{\partial t_n}{\partial \mu _n}=R_c$,所以,最终关于位置$\mu$的链即为:
实际上这里还省略了一项,如果球谐系数的分量不为0,那么还会多一项,但这里就省略了。我们把这五个属性放在一起看一下:
这个链式法则产生的计算图可以与一些实验时的现象结合,带来一些的观察:
如果一个不怎么该出现高斯点的地方有一个高斯点,那么它大概率是不可能通过优化$\mu$来到合适的位置的,它大概率会因为不透明度在几个iteration中变的很小,然后导致$\frac{\partial C_i}{\partial \alpha _n}$也很小,然后中道崩殂。
高斯点们之间唯一“通信”的地方只在不透明度的计算中,因为那里排序的先后顺序会影响穿透率。如果引入一个MLP,其实本质上是建立MLP的输入与这些属性的关系。比如输入坐标,这一定程度上是实现了“location-aware”。因为通过这样操作,神圣的MLP就把这些离散的高斯点联系在一起了,就开始NeRF了。这或许也解释了为什么用一些结构,如最早Plenoxels的这种用显式的球谐比MLP+camera pose要稍次一点,因为“primitives”之间没有“通信”。
当建模动态的事物时,由于上述机制,adaptive-densification是乏力的。因为动态时所重建的对象在不同帧下会反馈比较混沌的梯度信号,$\frac{\partial \mathcal{L}}{\partial \mu _n}$本身参考意义就不是很大。
“adaptive densification只是你的谎言。”——一位一觉醒来发现point居然densification到了500k的学生说。
以及如果在初期时一旦有一些点不透明度接近0了,那他们会“直接死亡”,没法复生。在这种情况下,感觉还不如随机在现在的点周围sampling。
所以一个常识“先学到一个好的canonical,再学deformation”是必要的。这也是前四篇工作一直在想办法找canonical的原因。
当我们有了一个差不多的解的时候,是否还有必要让每个高斯点都是learnable的?用一种progressive manner是不是更合适呢?
所以如果要像前四个工作一样,那就要想办法确定一个canonical,然后再学Gaussian,这也是比较有创意的部分。而后两个工作,其实完全破坏了Gaussian的显式特性,把他们变成了一个“特征寄存器”,我个人不太喜欢这种方法。
我现在能做到的结果已经梦回PointAvatar了,我明明用的是Gaussian splat,然而结果跟sphere splat的没啥区别,这其实就说明在变形的阶段的优化是很ambiguous的。怎么能不落俗套的再搞一个canonical出来,这是一个很有意思的事情。

End
“快过年了,不要再科研了,看那几本论文集。在生活种并不能给你带来任何实质性的作用。朋友
们兜里掏出一大把钱吃喝玩乐,你默默在家远程服务器打开shell,亲戚吃饭问你一个人闷屋子里在干什么,你说我刚改了改了套参数又改了改代码,亲戚们懵逼了你还在心里默默嘲笑他们,不懂得 CCF-A 多闪亮多梦幻,亲戚都在说自己子女一年的收获, 儿买了个房,女儿买了个车,闺女出国定居了,你的父母默默无言,说我儿子是科学家,在家对着黑黢黢的屏幕十天动都不带动了。”

