
在NeRF中,我们知道最后MLP预测的体密度其实是“不保真”的。那么有没有什么办法可以让其预测的体密度是符合客观几何的呢?这样就可以满心欢喜的达成事实上的“重建”了。
针对这个问题,有两篇同一时期的工作给出了圆满的答案。NeuS和VolSDF,他们解决的问题比较类似,但切入的视角并不一样。
由于他们都是基于NeRF所构造的“可微+体渲染”框架下的改进,所以这篇blog可能并不会去分析代码和具体实验,主要捋清这两篇工作推导的逻辑(形式与数学上)。
这两篇工作里当然会涉及到很多图形学上的背景知识,但就像不同背景的人对“傅里叶变换”会有不同的理解,没有学过CG也没有关系,我们总能在理解这两篇工作的同时找到乐趣所在。(自我安慰.jpg)
Signed Distance Function
用神经网络来表达一个3D场景,有很多种方法。具体来说,可以通过引入不同的归纳偏置。例如显式的体素网格,点云,网格;隐式的,例如Occupancy Networks以及我们要提到的符号距离函数(SDF)。
神经网络到底应该输出什么“representation”来表征3D场景,早些年间有许多讨论。我在写这篇blog的时候也回顾了一下,挑选了一些代表整理于此,各倾陆海云尔。
体素:3D ShapeNets: A deep representation for volumetric shapes (CVPR 2015)
点云:A point set generation network for 3D object reconstruction from a single image (CVPR 2017)
网格:Pixel2Mesh: Generating 3D Mesh Models from Single RGB Images (ECCV 2018)
占用网格:Occupancy Networks: Learning 3D Reconstruction in Function Space (CVPR 2019)
符号距离场:DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation (CVPR 2019)
这些都是2020年之前的,或许自NeRF出来以后,人们就更关注NeRF那一套框架了。
在NeuS和VolSDF中,都借助了SDF这个工具,用来隐式的表示三维重建中想获得的那个曲面。SDF的定义非常好理解,给定$\varOmega \subseteq \mathbb{R} ^3$是目标物体的点集,那么$\partial \varOmega$是其边界(也就是我们想要的曲面),$d(\cdot,\cdot)$为一个距离函数,对于$\boldsymbol{x}\in \mathbb{R}^3$有:
其中$\varOmega ^c$是$\varOmega$关于$\mathbb{R}^3$的补集。也就是说如果$\boldsymbol{x}$在曲面内部,那么计算点到曲面的距离,取负;如果$\boldsymbol{x}$在曲面外部,那么距离取正。给定$f(\cdot)$的情况下,我们就可以将目标曲面转述为:
这种写法也叫SDF的零集集合(zero-level set)。
SDF有一个有趣的性质,由于点到面的距离定义的是点到面上一点的最小长度,假设最短距离对应的是曲面上的点$p$,那么$x$到$p$的方向也正好是SDF下降最快的方向。所以考虑其梯度:
实际上这里并不严谨,这里要求$\varOmega$有一些性质,从而保证SDF“几乎处处可微”。“几乎处处可微”这一点在VolSDF的推导中被提到了,我们可以先不管。
其恒等于1。这一点曾经很重要,因为SDF其实是一类重要的偏微分方程的特例:
当$c\left( x \right) \equiv 1$时,就是刚才讨论的符号距离函数。这种偏微分方程又叫程函方程(eikonal equation),用于描述波动中波前的传播。如果在这个背景下,$f(x)$则是到达点$x$时波需要行进的时间,而$c(x)$是点$x$处的波速。在后来的一段时间里,人们比较沉迷于用偏微分方程来作图像处理,而当$c(x)$取为常数时,这样的波动方程的梯度的模长又是恒定的,所以带来了较好的数值稳定性。不过随着炼丹的兴起,人们已经不怎么提PDE之于图像处理的那些方法了。
当然,在后面我们会发现,SDF的这个性质会在NeRF的管线下贡献出一个很好的正则项。
这就是我们需要提前知道的关于SDF的知识了。
所以,我们知道,体渲染很好,SDF也很好。在NeRF的框架下,MLP接收输入$\mathbf{r}(t),\mathbf{d}$,得到输出体密度$\sigma(\mathbf{r}(t))$和颜色$c(\mathbf{r}(t),\mathbf{d})$。如果我们让输出的体密度变成SDF此时的值,即$f(\mathbf{r}(t))$,(如果这样能成功)那我们就能得到满意的曲面。但这样就不能直接体渲染了,所以我们需要想一些办法,将输出的SDF转化为某种类似体密度的东西,然后来跑通体渲染。
其实,在NeRF中的MLP,他知道自己的某个头输出的是“体密度$\sigma$”吗?他其实不知道。如果你去采访一下他:“感知器先生,您输出的这是什么啊?”,他大概只能支支吾吾的回答:“我也不知道,我只知道把一百来个这样的东西分别相乘然后全加起来,好像就是一个有意义的颜色了。”
NeuS
我们回顾一下体渲染的公式:
关键在于:
的构造。我们希望$w(t)$取极大值的地方,也是满足$f(\mathbf{r}(t))=0$的地方。这在NeuS中被称为Unbiased。
同时注意体渲染的一个性质:$T(t)$是单调递减的。因为我们会让体密度是大于0的值,所以$T(t)$里的那个积分会变得越来越小,导致$T(t)$随着$t$越大,越接近0。这样,如果沿着光线发射的方向观察,在前面的一个点,对颜色的贡献$w(t_1)$,就会比在后面的一个点的贡献$w(t_2)$大,这在NeuS被称为Occlusion-aware。
我们先说回对SDF进行变换的这件事。在NeuS中,作者们提出对SDF应用如下的变换:
将$\phi_s(f(\mathbf{r}(t)))$记作S-density,$\phi_s(x)$是我们熟悉的Sigmoid函数的导数:
这里挑Sigmoid函数作为原函数,其实是“便于计算”。因为后面的推导里,我们会发现我们只需要计算钟形曲线$\phi_s(\cdot)$的原函数即可,那,最方便的就是拿Sigmoid算,而Sigmoid的导数,就是上面的了。
这篇blog并不打算去分析NeuS的项目代码,但先简单的检视那几个文件,会对我们之后的理解更有帮助。在NeRF里,我们定义了一个NeRF类,它在计算时的两个输出直接作为sigma和RGB。在NeuS里这稍微被写的复杂了一些(因为后续的可能的提取mesh等功用,整个网络被分开定义了),NeuS里实际定义了一个
sdf_network,一个deviation_network,一个color_network。sdf_network忠实的输出$f(\mathbf{r}(t))$,deviation_network只有一个参数,就是刚才的$s$,然后color_network是将sdf_network的输出,以及一些其他输入一起加工,最后得到RGB的网络。
这里的$s$,作用是为了调整$\phi_s(x)$的带宽:
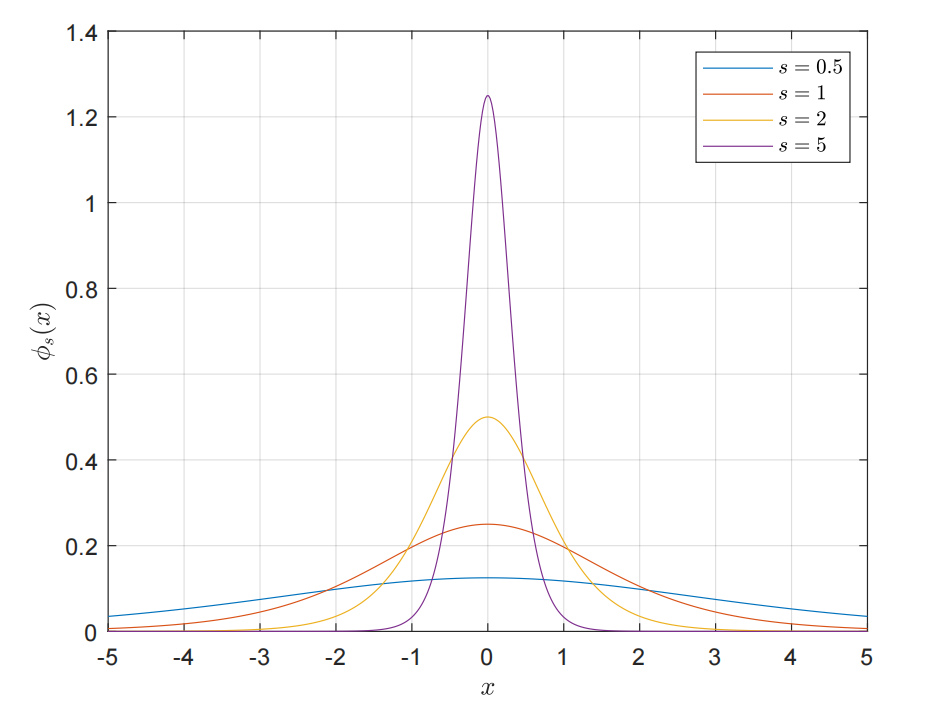
可以看到,$s$越大,$\phi_s(x)$越接近尖峰函数。实际上,我们可以直接推导出$\phi_s(x)$的标准差,NeuS中说“is given by $1/s$”,但作者应该是把常数因子给省略了,或者在书写时混淆了参数化前后的逻辑斯蒂分布。我们这里重新推导一下,注意到由于对称性,$\mathbb{E} \left[ X \right] =0$,那么由方差的定义:
作第一类换元积分,令:
则原积分化为:
根据$u$的定义,我们可以用$x$来表示$u$:
所以将$x$带入积分中:
对于积分项中的第一项和第三项其实是相等的,反复运用分部积分即可求解:
中间的交叉项就比较复杂了,我们可以借助经典级数:
来对其进行展开,同时我们赌一把积分和求和可以交换顺序:
然后就变成了高数习题里的一个常见的级数和,我们进行裂项:
所以最终的方差即为:
所以严格来说标准差其实是$\frac{\pi}{\sqrt{3}s}$,但有时会进行重参数化,来配凑均值为0,方差为1的逻辑斯蒂分布。所以作者可能以为这个式子是已经参数化后的,所以说标准差是$1/s$,这不重要,我们这里只是做一下积分练习。通过标准差我们可以直观的看出来,$s$越大,其标准差就越小,带宽就越窄。
现在,我们认为$\phi_s(f(\mathbf{r}(t)))$就是一个很好的替代$\sigma(f(\mathbf{r}(t)))$的操作,现在我们考虑,如果MLP输出的$f(\mathbf{r}(t))$已经完美拟合了一个曲面$\mathcal{S}$,此时考察曲面上任意一个点,在这个点附近将曲面近似为平面,我们考察在这个简单的平面上的SDF,即对SDF进行一阶展开,则此时的$f(\mathbf{r}(t))$可以近似为:
如下图所示:
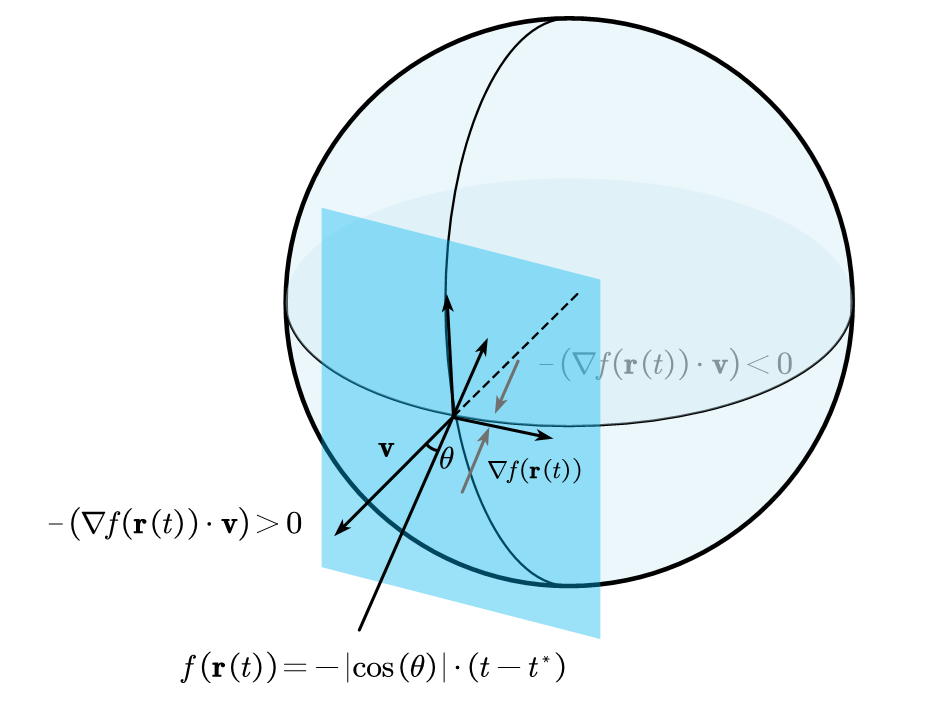
注意到随着光线从外部射入内部,再从内部远离交面,符号距离函数的梯度方向会发生变化。然后如果我们此时直接用$\phi_s(f(\mathbf{r}(t)))$来替代先前的体密度$\sigma(f(\mathbf{r}(t)))$(下文中我们直接将$\mathbf{r}(t)$略写为$t$,这在分析其导数性态时没有影响,因为$\mathbf{r}(t)=\mathbf{o}+t\cdot\mathbf{n}$只是一个简单的线性函数。):
然后我们将$\sigma(t)$换为之前讨论的$\phi_s(f(\mathbf{r}(t)))$,由链式法则:
所以考虑$f\left( \mathbf{r}(t^{\ast}) \right) =0$,此时权重的一阶导:
所以,在SDF取极值的时候,$w(t)$不能取极值。
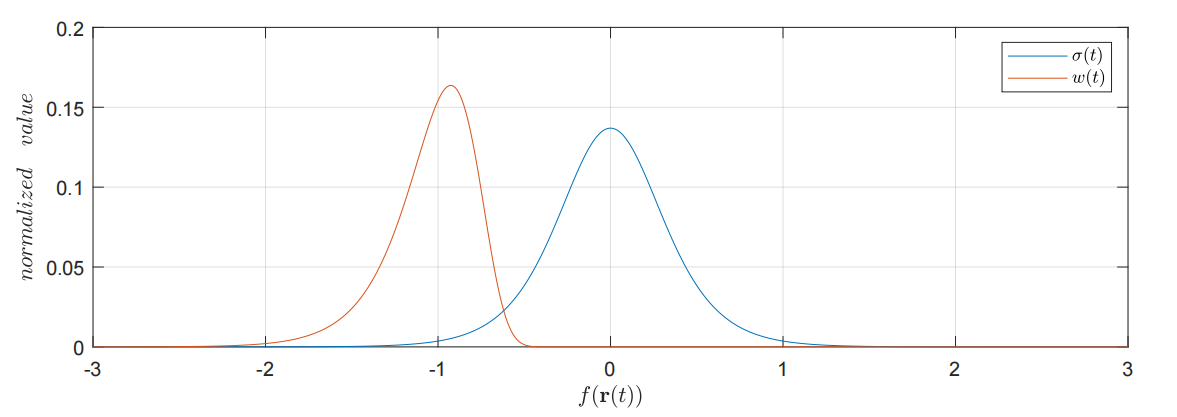
所以NeuS怎么做了呢?他们说:“想让$f\left( \mathbf{r}(t) \right)$取到极值的时候$w(t)$也取极值很简单,我直接:”
这是很直接的一种办法,这不就是$f\left( \mathbf{r}(t) \right)$取极值然后$w(t)$也就极值了。由于$w(t)$一般都是非负的,并且考虑到一些数量级上的问题,可以将其定义为被归一化后的版本:
注意积分下限是0,这个地方其实闹了两年的乌龙。在NeuS最早的版本和在NIPS上camera ready的版本里,在后面的一步推导里,积分下限变为了$-\infty$,当下限变为$-\infty$时会带来一些数学上的方便(概率密度函数从负无穷积到正无穷为1)。但这显然不太合适,直到23年3月份,arxiv上的版本更新了一版,在正文里用“简单平面入射”的例子里,强加一条“相机在无穷远”处的假设,从而直接取$t^{\ast}$为$+\infty$,然后导致最后要处理的积分相当于上下限是无穷的。
我个人觉得这完全没必要,尤其是$t^{\ast}\rightarrow +\infty$这一步,其实带来了更大的困扰。我有一个更合理的解释,因为我们一直以来用的$t$,其实都是光线那条直线参数方程里的$t$,它当然应该是正的,从0开始积分指的就是从相机坐标处开始发射。然而其实正常情况下,此时的SDF值都会比较大(除非你直接怼着什么东西拍),SDF等于0的点绝对是在沿着$t$增大的方向里,$t$为负的那些点(相机背后)我们肯定是当它没有东西的,所以此时SDF会比在0时的更大,对应的$\phi_s(f(\mathbf{r}(t))$其实很小了。我们可以直接假设从负无穷积到0的这个部分相比于从0积到正无穷的部分,可以忽略。
在这个逻辑下,论文的推导就不会有什么问题。我们可以推导出归一化后的$w(t)$:
我们会发现,在这样的假定下,这个复杂的分母会变成一个定常数$\left| \cos \left( \theta \right) \right|^{-1}$,所以这种设置是可以实现Unbiased的,但不能实现Occlusion-aware。只要$w(t)$还可以像$w(t)=T(t)\sigma(t)$一样,用一个单调递减的$T(t)$与一个密度表示$\sigma(t)$调制出,即可实现Occlusion-aware。
我们假设这种表述为$\rho(t)$,现在我们通过联立方程来求解它:
注意到:
于是我们得到了一个很简单的微分方程:
我们记$\phi_s(\cdot)$的原函数Sigmoid函数是$\varPhi_s(\cdot)$,以及$\frac{\mathrm{d}\left( f\left( \mathbf{r}(t) \right) \right)}{\mathrm{d}t}=-\left| \cos \left( \theta \right) \right|f\left( \mathbf{r}(t) \right) $,代换后两边积分,所以可以得到:
进一步:
这里积分下限选$-\infty$和0是无所谓的,因为在我们先前的讨论中,我们其实已经默认了相机以及相机背后是没有东西的,所以其$\rho(\cdot)$一定是0。
这其实非常离经叛道,无论是过程还是结果。过程上,我们是直接选择了一种无偏的$w(t)$,然后反推出能支持这个$w(t)$的“渲染方式”。结果上,$\rho(t)$的分子涉及$\varPhi _s\left( f\left( \mathbf{r}(t) \right) \right) $的一阶导,这说明这个$\rho(t)$还会被其邻域内的$\rho \left( t\pm \delta t \right) $所影响,然而在传统体渲染中,这些不应该是相关的。
然而这只是解决了单个平面,当遇到多个平面时会遇到这样的问题:
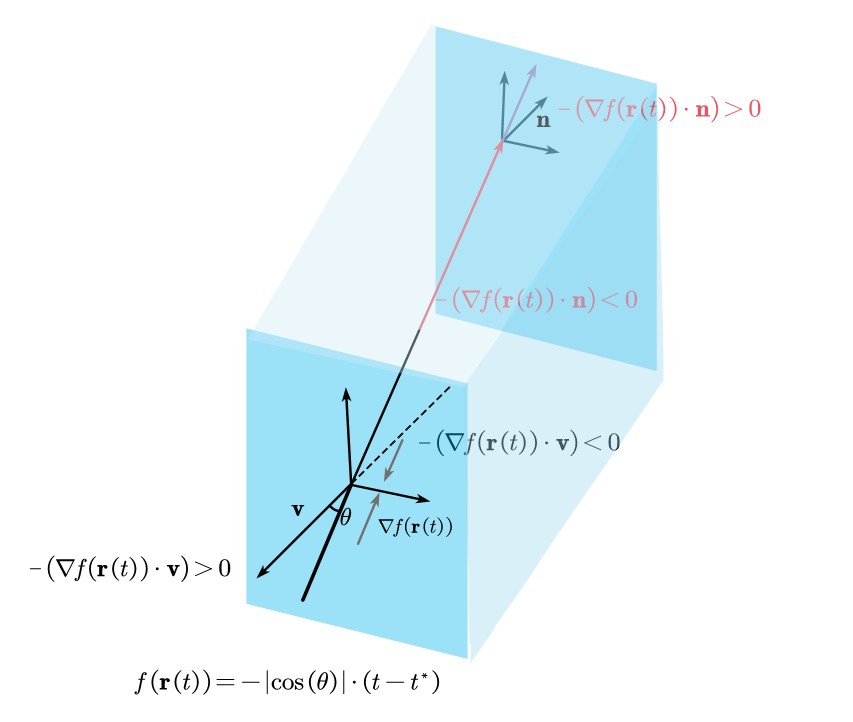
当有两个平面时,$\rho(t)$可能会变成负的,原因是这样的,$\rho(t)$的分母是恒正的,分子,在光线射入一个平面时,SDF从正数逐渐减小到0。所以$\varPhi(t)$的导数值是负的,加上前面那个负号,$\rho(t)$是正的了;当光线远离第一个平面时,SDF从0继续减小到负的,所以没什么问题。但当光线继续前进,距离第二个平面的距离比第一个近时,由于SDF的定义,此时SDF会从一个负数(因为我们此时在一个物体内部)逐渐增大成0,这样就会导致$\varPhi(t)$导数值是正的,导致$\rho(t)$是负的,这可能会产生些问题。
于是作者提议可以直接对计算出的$\rho(t)$进行截断:
这一段内容在作者的叙述里逻辑变得可能不是那么好理解,作者画了一个图,说明第一个平面是“visible surface”,然后说第二个平面是“invisible surface”,很令人困惑。凭什么第二个平面就是“invisible”的?难道我们不该重建第二个平面吗?这样对$\rho(t)$一截断,第二个平面就不可能被反向传播更新了(注意更新的核心还是体渲染的结果与ground truth的二范数)。
我的个人理解是,考虑我们是如何获得NeuS的几何的:
1 | def extract_fields(bound_min, bound_max, resolution, query_func): |
从代码里可以看出,核心是输入一个$(x,y,z)$去查sdf_network里的值,那么我们关心的是$f\left( \mathbf{r}(t) \right) $,并不是$\rho(t)$和$w(t)$。以及$f\left( \mathbf{r}(t) \right) $本身是NN预测的,并不是有个预先的定义,NN并不会知道哪些是物体内部,哪些是物体外部。 假设我们拍摄一个正方体,如果只对着正方体的前侧进行拍摄,那么NeuS最后计算出的只会有一个面。如果我们绕着这个正方体进行拍摄,拍到了它后侧的情况,那么为了让后侧渲染出来的结果符合ground truth。网络会在此时赋予后侧的$(x,y,z)$一个接近0的SDF,但NN此时也并不知道前侧的平面和后侧的平面,代表的是一个“物体”。NN只是由于有了后侧的输入,所以才做出了一个符合后侧拍摄图片的响应。在这个过程里其实并不会涉及到刚才图示中,什么$\rho(t)$变为负的的情况。所以这样,SDF其实并不会按照定义来呈现,它可能会是阶跃的,或者非常杂乱。
所以为了更好的生成几何,最直接的办法是让生成的SDF——“你最好真是SDF”。于是他们应用SDF的梯度模长为1的性质,会补充一项loss,也叫Eikonal term:
有了这个正则项,NN预测的SDF,就会是连续的。从而就有可能导致$\rho(t)$变成负的,而负的$\rho(t)$所引发的梯度信号,会同时影响前后两个平面的重建。于是干脆就把负的$\rho(t)$截断就好,只要我们拍摄了后侧的图片,那么NN一定会根据这个需要,重建出一个关于这个平面合理的SDF。而这两个SDF之间的阶跃,就会由$\mathcal{L}_{reg}$补上。
最后一步就是推导离散版本下的“渲染积分”,作者可能是想对齐NeRF实现时,用alpha compositing的路子,同时也注意到$\rho(t)$是$-\ln \left( \varPhi _s\left( f\left( \mathbf{r}(t) \right) \right) \right) $求导出的结果吧。选择从$\alpha_i$来进行离散化,我们知道:
所以:
如果,此时$\rho(t)$是非零的:
如果此时$\rho(t)$是零,那么$\alpha_i$显然也是0。由于$\rho(t)$在非零时,$f(\mathbf{r}(t))$是单减的,所以$\alpha_i$也是恒正的。于是:
这就是,NeuS的构造了。其实给人的感觉不是很舒服……感觉作者先是从$w(t)$那个构造入手,然后反推出的这些,其实有些不自然。
VolSDF
“这位更是重量级”——佚名
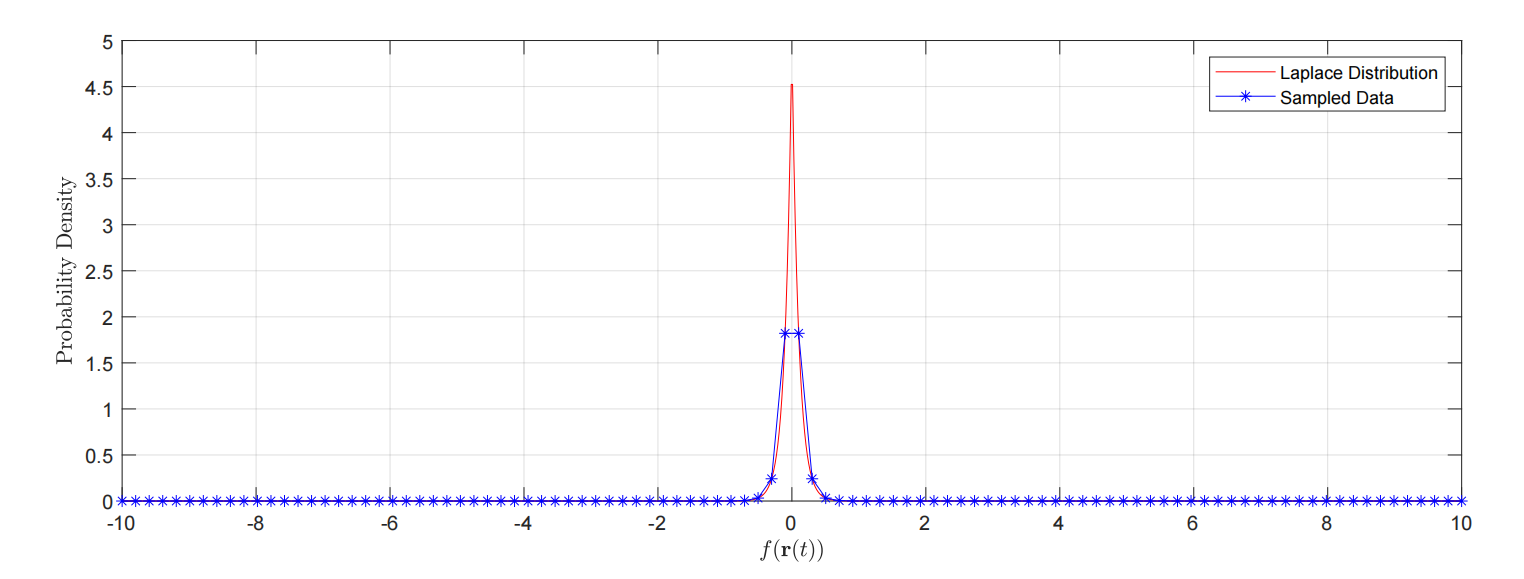
VolSDF有着很重的“机器学习”色彩,它最开始也是用一个钟形曲线,只不过它取的是拉普拉斯分布:
拉普拉斯分布的标准差是$\sqrt{2}\beta$,所以$\beta$越大,曲线越扁平。

然后,不同于NeuS的是,VolSDF的思路非常直接!“体渲染出的体密度不好?体渲染没问题,是对体渲染进行离散化时产生的误差所致。我先给你推个误差界。”
为了避免混淆,我们在这一节沿用VolSDF的符号,在VolSDF中,直接记$\sigma \left( x \right) =\alpha \varPsi _{\beta}\left( f\left( \mathbf{r}\left( t \right) \right) \right) $,所以下文中出现$\sigma(\cdot)$时,均是被转换过的SDF,不再是体密度。
这里$\alpha=\beta^{-1}$,是为了调整尖峰函数的幅度。所以要学习的参数也只有一个$\beta$,和NeuS类似。
在NeRF中,透明度(Transparency)定义为:
那么不透明度(opacity)定义为:
我们关心,连续下的$O(t)$和离散估计出的$\hat{O}\left( t \right) $的误差。这很合理,注意此时的$\sigma(x(t))$代表一个尖峰函数,所以容易出现这样的情况:
即,由于离散,从而等间距采样,是很难得到尖峰分布的极值点的。也就是说我们关心的是误差$E(t)$:
这里$\hat{R}\left( t \right) $是进行寻常离散后的结果。
整个推导误差界的思路可以概括为:
- 由于$\sigma(x)$是SDF的复合函数,并不处处可微,所以转向推导其利普希茨(Lipschitz)上界
- 证明在一个积分段中,$\left| \frac{\mathrm{d}\sigma \left( x(t) \right)}{\mathrm{d}t} \right|$存在上界。
- 从而推出在一个积分段中,$|E(t)|$的绝对值存在上界。
- 于是推出$\left| O\left( t \right) -\hat{O}\left( t \right) \right|$存在上界。
我们开始吧。
首先对于一个积分段$[t_i,t_{i+1}]$,对于其中任何的$s,t$,我们定义利普希茨常数$K_i$:
我们根据$\sigma \left( x \right) =\alpha \varPsi _{\beta}\left( f\left( \mathbf{r}\left( t \right) \right) \right) $对不等式左侧进行推导,希望最后能得到有着$K_i|s-t|$形式的不等式。
注意到$\varPsi_\beta(\cdot)$的利普希茨常数是其导数的最大值,记:
所以我们可以进一步推导为:
注意右边因式的第一个部分,我们知道SDF的导数值最大也就是1,所以自然有:
同时,注意$\varPhi _{\beta}\left( s \right)$是恒正,且关于$s=0$对称并向两侧递减。所以最大的$\varPhi _{\beta}\left( s \right)$意味着最接近0的$s$,也就是最接近某个曲面的$f\left( x\left( t^{\ast} \right) \right) $值。这个SDF的值的绝对值,我们记作$d_{i}^{\ast}$,所以式子可以归结为:
我们对齐了不等式!所以我们有:
$d_{i}^{\ast}$是可以求解的,即使它在后面的推导里并不会显式的代入进来,求解$d_{i}^{\ast}$其实很像一道高中数学题。问题的表述是,我们已知$f\left( x\left( t_i \right) \right) $和$f\left( x\left( t_{i+1} \right) \right) $,也就是说对于$t_i$和$t_{i+1}$,我们知道其到曲面的最短距离$d_i$和$d_{i+1}$,那么在已知$d_i$和$d_{i+1}$的情况下,如何求解$[t_i,t_{i+1}]$内的点到曲面的最短距离$d_{i}^{\ast}$的下界?
我们可以进行分类讨论:
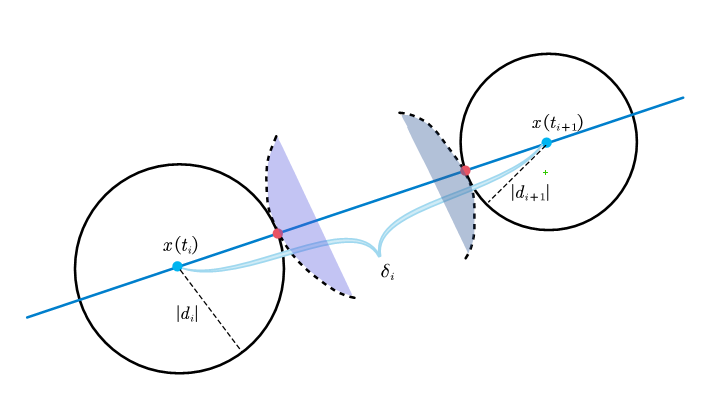
此时,$|d_i|+|d_{i+1}|\leqslant \delta_i$,可以直接看出,如果有曲面恰好能过红点处,那么$d_{i}^{\ast}$下界即为0。如果继续增加$|d_i|$和$|d_{i+1}|$:
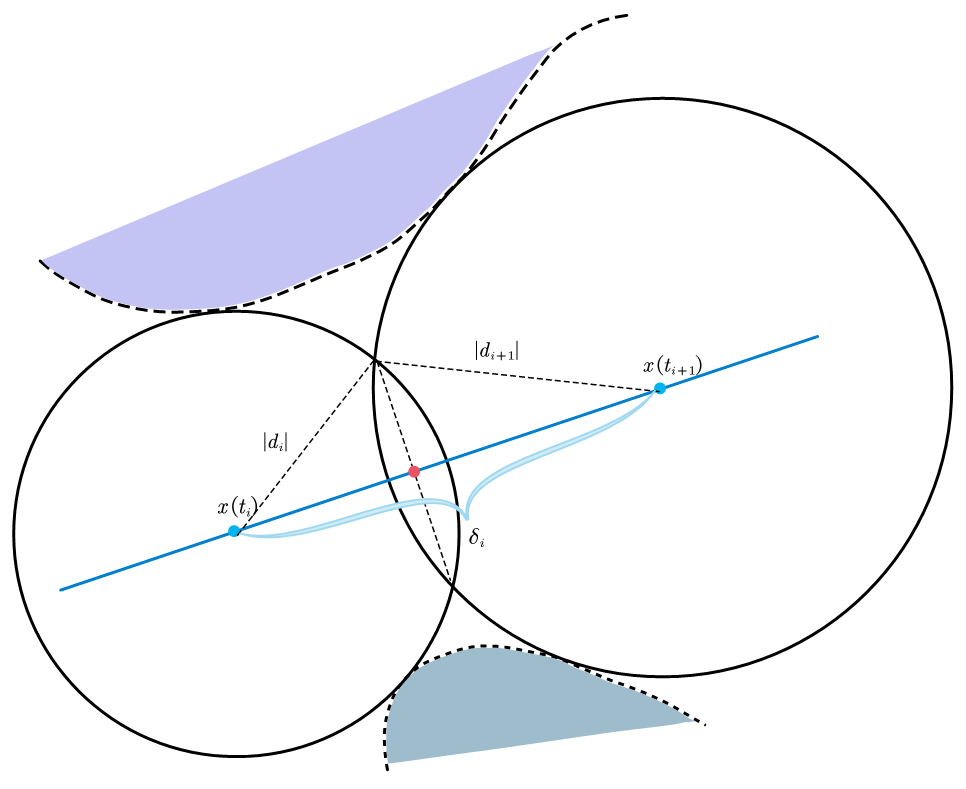
两点的最短距离张成的球面(在图里就是圆了)会有交集,那么会形成一个三角形,这个三角形关于$\delta_i$那条边的高,就是距离下界。结合海伦公式和等面积法,我们可以推导出高$h_i$为:
此时$h_i$就是下界。
如果进一步增加,形成的三角形可能变为钝角三角形,这样高的垂足就落不进$[t_i,t_{i+1}]$了:

这种时候,距离下界就是$\min \left\{ |d_i|,|d_{i+1}| \right\} $,这种情况的判定,可以由余弦定理,判断$\delta_i$边上的两个角是否为锐角,即:$\left| |d_i|^2-|d_{i+1}|^2 \right|\geqslant \delta _{i}^{2}$,所以,综合三种情况,可以给出$d_{i}^{\ast}$下界:
现在,我们可以继续往下推导了,我们关注一个积分段$[t_i,t_{i+1}]$上的$E(t)$,根据积分的三角不等式:
进一步,用利普希茨常数进行放缩:
将这个估计进行离散求和,得到误差$E(t)$的估计$\hat{E}\left( t \right) $,得:
注意连续下的误差是要比离散下的更少的,所以有:
现在,准备工作终于要结束了,我们回忆不透明度的连续情形和离散情形:
我们直接计算:
接下来使用一个不等式$\left| 1-\exp \left( x \right) \right|\leqslant \exp \left( \left| x \right| \right) -1$,这个不等式说实话很巧夺天工,既去掉了不等号,又能给$E(t)$套个绝对值(因为你很难直接操作$E(t)$,你不知道它是正是负)。所以:
同时$|E\left( t \right) |\leqslant |\hat{E}\left( t \right) |$,所以得到上界:
由于$\hat{R}\left( t \right) $单调递增,所以$\exp \left( -\hat{R}\left( t \right) \right) $单调递减,同时由于离散误差的累积效应,$\exp \left( \left| \hat{E}\left( t \right) \right| \right) $单调递增。所以给定一个特定的离散区间$[t_k,t_{k+1}]$,有:
最终,作者取所有区间中的最大上界,标记为一个新的界$\mathcal{B} $。
同时定义离散采样的划分$\mathcal{T} =\left\{ t_k \right\} _{k=1}^{n}, 0=t_1<t_2<…<t_n=M$。
所以这个界$\mathcal{B} $可以视为$\mathcal{T}$和$\beta$的函数:
观察这个上界,可以得到两个结论:
一个是如果固定表征SDF时所用的$\beta$,那么只要$\mathcal{T}$采样足够致密,就可以达到任意的误差:
所以只要$\delta_i$越小,$\mathcal{B} _{\mathcal{T} ,\beta}$就会越小。
另一个结论是,假设均匀采样,固定采样间隔$\delta_i=\frac{M}{n-1}$,足够大的$\beta$也可以实现任意的误差,可以通过构造:
来获得足够大的$\beta$,这是因为:
这两个结论比较显然,但一味的增加采样点,会带来计算负担。一味的增大$\beta$,会导致尖峰函数变得不尖。于是一个很好的想法是在这两者之间找到一个平衡。
基于此,VolSDF的作者再次发力,根据这两个结论提出一个采样的策略。这个采样的目的是构造一个误差在我们控制范围内的$\hat O[i]$序列。
首先,先初始化采集$n$个点,文中是128,然后根据第二条结论,选取一个比较大的$\beta_{+}$来满足$\epsilon$。注意,此时,训练好的网络本身是有一个$\beta$的。但显然$\beta$是不满足结论2的,即$\mathcal{B} _{\mathcal{T} ,\beta}> \epsilon $。
只要$\mathcal{B} _{\mathcal{T} ,\beta}> \epsilon $,并且还没到最大迭代次数,就进入一个循环体。由于$\beta_+$是从最开始的$\mathcal{T}_0$里计算出来的,从而$\mathcal{B} _{\mathcal{T} ,\beta_{+}}\leqslant \epsilon $也一定是绰绰有余的。然而$\mathcal{B} _{\mathcal{T} ,\beta}> \epsilon $,所以根据介值定理,一定有一个$\beta_{\star}\in(\beta,\beta_+)$可以使得$\mathcal{B}_{\mathcal{T},\beta_{\star}}=0$。由于$\mathcal{B}_{\mathcal{T},\beta}$某种意义上可以说是单调的,所以可以用二分查找来找$\beta_{\star}$。之后用$\beta_{\star}$来更新$\beta_+$。
然后接下来,对序列$\mathcal{T}$进行上采样,然后重复上述操作,直到用最开始的$\beta$,就可以满足$\mathcal{B} _{\mathcal{T} ,\beta}\leqslant \epsilon $。通过这样的策略,我们就可以找到在给定$\beta$下,如何采一个误差在$\epsilon$以下的序列$\hat O[i]$了。
然后接下来的事情就是从$\hat O[i]$中进行逆变换采样,然后抽$m$个点,文中是64。得到一个计算负担不那么重,然后误差又相对较小的采样。
所以论文原文里的伪代码“algorithm 1”疑似把upsample和search beta两个部分写反了。
这基本就是VolSDF的内容了。可以看见,VolSDF只是对NeRF的框架进行了很小的修改,然后就是“对麻瓜使用魔法”版的做了数学推导,改进了采样的过程。整个推导走完,观感比NeuS要舒适很多,因为没有很多“天外飞仙”般的“硬植入”的操作。
但VolSDF也确实是“有偏的”,这里的有偏是相对NeuS所提出的无偏来说的,但这不影响整个框架的和谐。然而,由于VolSDF其较为复杂的工序,后面的工作还是以NeuS作为魔改的对象居多。但不得不说,VolSDF的解决方案确实很漂亮。但也属实是学不来,数学功底确实扎实,通篇其实没有用到什么出格的数学工具。只能说是“如听仙乐耳暂明”。
End
“我好想看芙利莲第八集。”——佚名
但其实,这两篇工作里,最为神奇的是,变换函数(无论是$\phi_s(\cdot)$还是$\varPhi_s(\cdot)$)所带来的奇迹般的巧合。在这两篇工作的数学推导里,这两个概率密度函数,无论是单调性还是积分和为1,还是单纯的导函数或原函数形式上的巧合,都成为推导能进行下去的必要因素。有些“妙手偶得之”的意思了。

