
扩散模型变得越来越流行,但它的原理并不像生成对抗网络一样那么的“明显”。于是在这篇blog里进行一下整理和学习。
扩散模型给我的第一感觉就像,元气骑士里的许愿池……
Forward Process
现在有许多介绍扩散模型的资料,他们都会说出一个形象的理解:一张图片,对它逐渐加噪。然后逐步去噪。但这直观的理解并不是“很有用”。为了更深入的理解,还是需要读懂扩散模型中的那些数学表示:
考虑初始的数据分布$\mathbf{x}_0\sim q\left( \mathbf{x} \right) $,那么向数据中逐步加入高斯噪声的过程,可以写作:
上式实际上给出:在已知$\mathbf{x}_{t-1}$的条件下,$\mathbf{x}_{t}$的分布服从一个均值为$\sqrt{1-\beta _t}\mathbf{x}_{t-1}$,方差为$\beta _t$的高斯分布。直观理解上,就是将一张图片,轻微的上下震荡,从而使得图片略微失真。这里的$\beta _t$可以理解为一个“调度器”,因为如果这一过程是完全线性的,研究人员指出图像的信息会消失的太快。
实际上这个过程是一个一阶马尔可夫链,$t$时刻只与$t-1$时刻有关。那么我们可以使用马尔可夫假设化简分子,继续展开,得:
加噪的过程,并不需要一步步迭代相乘。并且,注意到:如果需要从一般的高斯分布$\mathcal{N} \left( \mu ,\sigma ^2 \right) $可以由标准正态分布$\mathcal{N} \left( 0,1 \right)$作仿射变换得到。这一操作被称为“重整化”。所以,之前的加噪过程可以写为:
这么写的很凌乱,令$\alpha _t=1-\beta _t,\bar{\alpha}_t=\prod_{i=1}^t{\alpha _i}$。同时,根据方差的性质和线性可加性:
所以可以化简为:
进一步,得:
即给定一个初始图片,就能算出第$t$步的$\mathbf{x}_t$。
Reverse Process
加噪是简单的,问题的关键在于从噪声中恢复原图像,即反向扩散。我们在此处停顿一下:虽然印象里,我们说:给图像加噪,然后去噪。但是实际上我们现在并没有引入任何的参数。到目前为止我们只是推出了一个一阶马尔科夫链的加噪过程。
对于反向扩散$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) $,它的分布是未知的。但理论分析证明,连续扩散过程的逆转过程当扩散率(也就是这里的$\beta_t$)很小的时候,逆转过程的分布与正向分布时同分布。(这一定程度上也解释了为什么扩散模型要“forward”很多次)。
$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right)$很难得到,但从训练的角度来看。我们总是会输入一张原始图片$\mathbf{x}_{0}$,我们对于中间的隐变量的了解完全是由后验给出的。所以后验概率$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0 \right)$由贝叶斯公式:
最后的等号是由马尔科夫链的性质得到的。另一方面,由马尔可夫性,加入$\mathbf{x}_{0}$并不影响概率。由上述的在很小的$\beta_t$时的性质:
所以看起来我们只需要估计逆向时每一步的均值和方差即可。我们将上面用贝叶斯公式展开的式子直接代入前向扩散时的分布,我们知道高斯分布:
我们忽略掉前面的归一化系数,这在计算时不影响均值和指数上的方差:
我们整理指数上的二次型,会得到:
配方后,我们会发现,待估计的均值和方差可以写作:
这表明,方差是被调度器固定的一个值,我们不用估计它,我们只需估计均值。进一步,由上面重整化的技巧,我们可以把$\mathbf{x}_0$整理成$\mathbf{x}_t$的形式,可以得到:
上面的一番化简,其实只传达了一个信息:当给出$\mathbf{x}_{0}$时如何估计后验概率$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t,\mathbf{x}_0 \right)$。这要求的是,我得有$\mathbf{x}_{0}$,如果没有$\mathbf{x}_{0}$,我们还是不知道如何处理$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right)$。但一个很好的视角是:如果我们从炼丹的角度看,给出$\mathbf{x}_{0}$时相当于在训练。没有$\mathbf{x}_{0}$时表示在推断。
那么形式化上,我们学习一个模型$p_{\theta}\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) $来逼近$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) $。因为$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) $是高斯的,所以:
那么根据全概率公式:
同时注意到,根据贝叶斯公式:
以及,根据对$q\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) $的分析,实际上这个“逼近”,我们是希望它接近于
所以,模型要学习的即是:
来逼近$\tilde{\mu}\left( \mathbf{x}_t,\mathbf{x}_0 \right)$。
Variational Inference
现在,我们需要推导损失函数。只有完全走过这一过程,我们才能比较透彻的理解为什么扩散模型是在“预测噪声”。在这之前,要先引入“变分推断”的一些知识,因为扩散模型看上去就像层次化结构的变分自编码器。如何看的更早一些,这实际上是模式识别里贝叶斯推断的内容。但很遗憾的是我没学太明白。
考虑构造概率分布$p(\boldsymbol{x})$的一个近似分布$q(\boldsymbol{x})$,我们可以试图最小化两者的KL散度来得到$q(\boldsymbol{x})$,KL散度即为:
在变分推断中,想要近似的往往是后验概率$p(z|\boldsymbol{x})$,这里$z$称为隐变量。所以对于分布$q(z)$,要最小化的KL散度即为:
$p(\boldsymbol{x})$与隐变量$z$无关,根据概率密度函数的性质,积分为1。所以上式可以变形为:
记:
$L\left( q\left( z \right) \right)$称为变分下界函数,也称为证据下界。它可以进一步拆成:
可以看到,第二个等号里,前项是一个KL散度,后项可以写作一个期望。
Loss Function
现在,我们回到推导损失函数的路上来。很自然的,我们想通过最小化$q(\mathbf{x}_0)$和$p_\theta(\mathbf{x}_0)$的交叉熵:
然而,我们并不知道$p_{\theta}\left( \mathbf{x}_0 \right)$的表达式,没法直接计算交叉熵。我们试着通过之前全概率公式和贝叶斯公式展开的结果,来看看能不能获得什么启发:
为了表达的简洁,$\mathbf{x}_0,\mathbf{x}_1,…,\mathbf{x}_T$我们重新记作$\mathbf{x}_{0:T}$。
接下来一个在推导VAE时常见的处理作法,将损失函数转化到一个好处理的形式:
然后,由琴生不等式:
取$f$为$\mathrm{log}(\cdot)$,同时注意到期望的范围合并了。上面的损失函数可以化为:
最后的这一项,其实给出了一个很好的上界。这一形式见于之前变分推断的前置知识中的:
但是我们化简后的上界里,对数里面还存在不好表达的联合分布:但先前其实我们已经做足了准备工作:
所以上界对数里的$\mathrm{log}$,我们可以逐渐进行处理:
我们知道$q\left( \mathbf{x}_t,\mathbf{x}_{t-1} \right) $不好处理,还好之前我们有:
我们发现,后验概率不可避免的出现在了推导损失函数的过程中,注意下标的变化,我们继续展开:
注意到第二个求和符号,根据对数的性质,它是可以约化的:
对于现在剩下的三个落单的$\mathrm{log}$,有:
这样化简,会带来一个好处,因为$\mathbf{x}_T$是已知的采样出来的数据分布,$\mathbf{x}_0$是先验(输入的图片),这样当求期望时,常数的期望还是个常数。将整理后的式子关于$q$求期望,得:
最后一项是常数,我们不用管它。先关注最复杂的第二项。我们前面给出过:
高斯分布下的KL散度存在解析解,这里不再计算了,直接给出解析式:
我们知道,方差是被调度器所固定的,只需关注均值构成的二次型:
实践表明,不考虑前面的权重,生成效果更好,于是可以进一步化简为:
最后,还剩一个小问题没有被澄清,最前面那一项:
根据我们的模型$p_{\theta}\left( \mathbf{x}_{t-1}|\mathbf{x}_t \right) =\mathcal{N} \left( \mathbf{x}_{t-1},\tilde{\mu}_{\theta}\left( \mathbf{x}_t,t \right) ,\varSigma _{\theta}\left( \mathbf{x}_t,t \right) \mathbf{I} \right)$,当$t$为0时,这是一个多元高斯分布。最前面那一项代表的其实就是这个多元高斯分布的熵,而这个熵其实只与高斯分布的协方差有关:
所以看起来,这一项也是个常数。但是DDPM的作者指出,最后一步的过程不能简单的看作从$\mathcal{N} \left( \tilde{\mu}_{\theta}\left( \mathbf{x}_1,1 \right) ,\varSigma _{\theta}\left( \mathbf{x}_1,1 \right) \mathbf{I} \right) $中采样,而是在采样的基础上再加上一步离散化。这就导致这一项并不是个常数。DDPM原文中给出了一种计算这一项的方法,后来也被改进为单独用一个离散的“解码器”来建模,总之就是不用考虑这一项了。
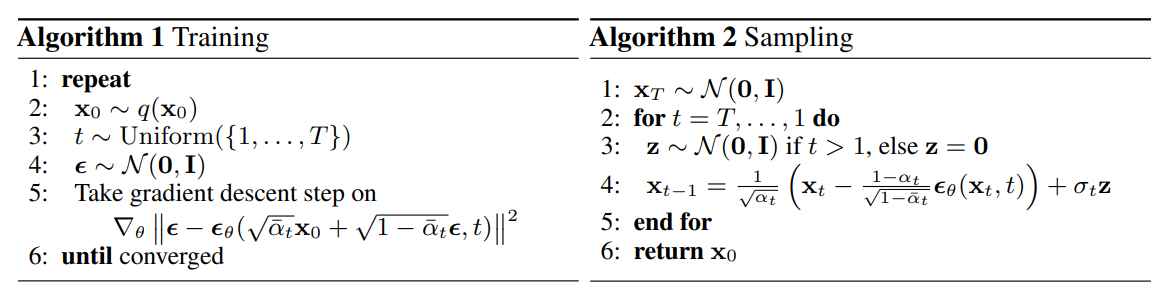
最后,训练和采样的过程,就像DDPM原文中给出的一样,非常简洁。训练时,从数据集中取出$q( \mathbf{x}_0)$,从均匀分布中抽样时间步$t$,再生成一个随机噪声$\mathbf{\epsilon }$。之后将前向扩散得到的$\mathbf{x}_t$和$t$输入模型,得到预测的结果${\epsilon }_{\theta}$,然后梯度回传,反向传播。
采样时,则直接采样一个高斯噪声$\mathbf{x}_t$,得到估计的噪声$\mathbf{\epsilon_\theta }$,利用估计的噪声$\mathbf{\epsilon_\theta }$和$\mathbf{x}_t$,计算估计的均值:
再从估计出的$\mathcal{N} \left( \tilde{\mu}_{\theta},\beta _t\mathbf{I} \right) $中采样得到$\mathbf{x}_{t-1}$,同样是用参数重整化技巧:
当$t=1$时,不再添加噪声。因为此时预测出来的已经是$\mathbf{x}_0$了,再多加噪声只会使得生成质量变差。
Demo
当有了这样的模型,第一时间我会做什么呢?显然是生成一下纸片人。之前我用Progressive Growing GAN玩过一次,这次用简单的DDPM实现了一下,发现DDPM比PGGAN实践起来简单多了,当然我还没来得及实践高分辨率的生成效果。
DDPM使用了加入了self-attention层的U-Net结构,将图像输入后,使用下采样和卷积,将图像投影到一个小的尺寸上。然后再使用上采样和卷积,把它再还原回原尺寸,同时下采样过程和上采样过程存在跳连。
由于这一过程需要向网络指出此时所处的时间戳$t$,所以引入了transformer中的位置编码:
这些信息会直接”加入“图像传播的过程中。
基本要做的,其实就是建立一个diffusion的类,剩下的就nothing new了:
1 | class Diffusion: |
以及一个trainer:
1 | def train(args): |
当然,如果现在去github上搜OpenAI或者别的project写的扩散模型,他们十分复杂,非常的长,他们有各种加速采样的tricks,以及更细致的损失函数。比如他们中有的忠实的实现了变分下界,而DDPM原文里实际上已经放弃了那一项。直接看他们的代码是非常不利于初学者的。
我最后合成了一个gif来作纪念:
可以看出,这看起来”come from nowhere“,在高斯噪声中突然就演化出了不同的图案,spectacular!
如果观察在训练时,不同epoch下,采样出的结果,会感到更加的神奇:
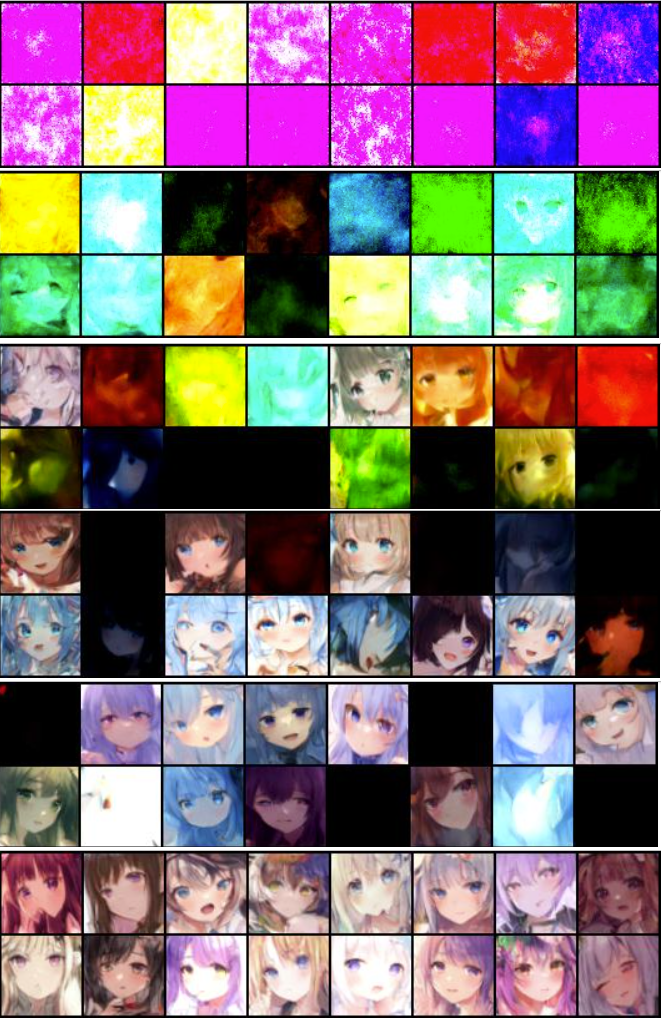
图片从上到下依次是epoch从小到大的结果。最初,网络去噪之后是一团混沌,随着训练的进行逐渐开始拟合噪声。如果我不过一遍上面那些式子,然后一个人过来,告诉我说:”你可以通过预测噪声来去噪,你每次只需rand出噪声就好了“。我是断然不信的,但是随机过程和动力学给出了insight,让这个操作得以实现。
我把img_size改成128的,期望生成分辨率更高的图片,这次的效果就没这么好了。一方面是数据集有限,另一方面是由于分辨率变大,self-attention的一个hidden_dim跟着扩大,导致训练成本有点贵了,于是随便玩了几下就不玩了。

有些结果还是很不错的。
End
这就是对DDPM的简单介绍了,一些加速采样,余弦schedule,设计技巧之类的操作,由于时间关系和篇幅原因,就不写了。可以从Sampling看出,这就是在一团噪声中取出了什么东西,就像许愿池一样。如果不是明天考认知计算,我还没开始看PPT,我会搓个demo试一下。
虽然,我可能最应该做的是找github的repo开始看文件然后魔改……或者去背PPT……推一遍公式然后写下来,除了消磨了我一天时间以外,估计也就锻炼大脑一个用处了。
由于我水平有限,不能很高屋建瓴的说出扩散模型和之前的VAE,GAN的异同。当然这设计上差距是很大的,感觉有一种mulit-scale的设计一直在这。算辣,这个不是很重要。

