在有了上一篇的铺垫以后,下面来简单介绍无约束条件和有约束条件的泛函极值问题,简单介绍完这一部分就告一段落了,在此前还要明确几个概念。
①自变量函数的变分:
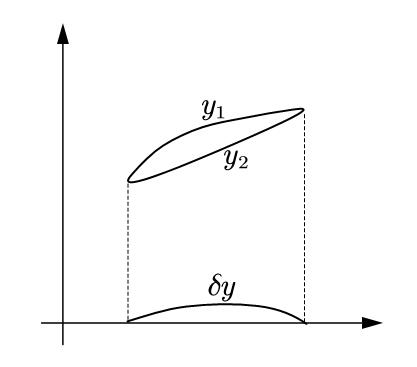
考虑自变量函数$y(t)$,那么$\delta y=y_1\left( t \right) -y_2\left( t \right) $,其中的$y_1(t),y_2(t)$是同属于函数类$\left\{ y\left( t \right) \right\} $的两个函数,在这里$t$最后变为了类似自变量的存在,当取$y(t)$为一维函数时,意思就是说:
②最简泛函及其变分:
最简泛函这个概念是从我们之前讨论过的最速降线的问题导出的,它是说:设$F\left( x,y\left( x \right) ,y’\left( x \right) \right) $是三个独立变量在区间$[x_0,x_1]$上的已知函数,且二阶连续可微。(其实确定了$y(x)$,$y’(x)$也就随之确定。),那么泛函:
称为最简泛函,其中函数$F$称为泛函的核,那么考虑$y(x)$的变分$\delta y=y_1\left( x \right) -y\left( x \right)$以及它的一阶导的变分,则根据定义我们写出泛函$J$的增量:
取其线性主部为该泛函的变分,即$\int_{x_0}^{x_1}{\left( F_y\delta y+F_{y’}\delta y’ \right) dx}$,记作$\delta J$。
这里存在一个定理:
$J(X)$在$X=X^{\ast}$处有极值的必要条件是对于$X^{\ast }$在此处的变分,有$\delta J\left( X^{\ast },\delta X \right) =0$。实际上为了判断是极大还是极小,要计算二阶变分,但是由于实际问题中很容易判断是极大还是极小,所以没必要计算二阶变分。这个定理的意思实际上是说,当我们对一个$X^{\ast }$施加扰动,而此时将这一附近的$X^{\ast }$的函数带入泛函进行计算,泛函的值几乎不变,这是有意义的。
所以对我们前面分析出的线性主部,即泛函的变分,考察它为0的时候,根据上一篇我们的推导,它计算后的结果是:
在这个方程中,它的一种情况我们已经见过,即满足欧拉-拉格朗日方程,且第二项为零,但是之前讨论时,我们固定了两个端点,即最速降线下落的起点和终点,在这两点的$x,y$坐标是给定的,所以对第二项要做更进一步的说明:
当端点固定,即两个变分为零时,第二项自然为零。但当两个变分不为零,即端点不是固定的而是自由的时候,第二项如果仍为零,就要补加条件:
该条件称为横截性条件。通过补充这些,我们进一步完善了对于无约束的泛函求极值的问题,同样我们也能很简单的将其推广成自变量函数为向量函数时的情景,但是很多时候遇到的问题是有约束的,例如最初想解决的最优控制问题,我们进一步考虑将有约束的问题转化成无约束的问题来进行求解。
首先明确的一点是:最优控制问题一般有三种性能指标,但理论可以证明,三种性能指标可以互相转换,即它们是等价的,这里就举一个对于拉格朗日问题的例子:
考虑系统
给定时间$t\in \left[ t_0,t_f \right] ,x\left( t_0 \right) =x_0$,且终端$x_f$自由,性能泛函为:
欲求最优控制$u(t)$使得系统得以从初始状态转移到终端状态,并使得性能泛函取极值。这个例子实际上就是燃料最优的一种情况。
将状态转移方程写成约束方程形式:$f\left[ x\left( t \right) ,u\left( t \right) ,t \right] -\dot{x}\left( t \right) =0$,在多元函数求极值问题时,我们用到过拉格朗日数乘法,来将有约束的问题转化成无约束的问题,在这里我们也应用拉格朗日乘子法,构造泛函:
其中的$\lambda^T(t)$就是待定的拉格朗日乘子形成的n维向量,前人在此基础上想出了这样的方法:
定义哈密顿函数:
那么增广泛函$J’$可以作如下变形(分部积分):
就像我们先前用拉格朗日数乘法解决多元函数求极值的问题时一样,这里我们也要研究增广泛函取极值时的情况,即增广泛函的变分为零,那么根据上文的泛函的变分公式,此时我们变分的对象有控制$u$和轨线$x$,即是计算由$\delta u,\delta x$引起的$J’$的变分,即:
上式要为零,会得到如下等式:
(1)式称为伴随方程或协态方程,$\lambda$称为伴随矢量或协态矢量。
(2)即系统的状态方程,它是直接对哈密顿函数求$\lambda$偏导的结果(再结合状态方程)。
(3)称为控制方程。
(1),(2)联立称为哈密顿正则方程。
(4)为横截性条件,用于补充边界条件,例如当终端自由时,由于$\delta x(t_f)$任意,所以$\lambda(t_f)=0$。
但是后面的过程就很复杂了,有些时候里面的量是解耦的,但有些时候不是;有些时候形成的微分方程组变得十分复杂只能迭代求解,但是这种方法不好的地方就是,如果初值和真实值相差的比较大,则结果不易收敛;而且就算收敛,要解的方程组也是一个两点边值性质的微分方程组,这大大加大了求解的难度,尤其是两点边值这个问题,我直接被锤爆了,所以下面我只举一个比较简单的例子,难一点的例子求解起来,属实不大行,我太垃圾了。
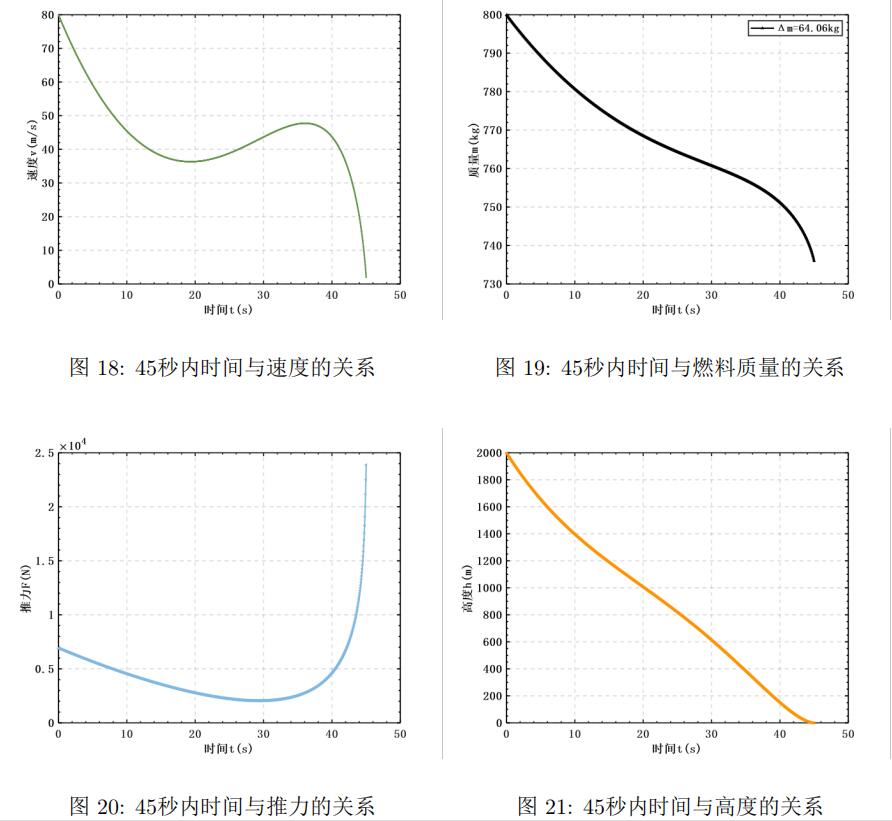
考虑一个竖直的动力着陆过程,主要依靠发动机来反冲,最后要使得在给定的一个时间,着陆器安全降落:
边界约束条件${G}$为:
构造哈密顿函数:
控制方程:
协态方程:
下面考虑将给定的时间${t_f}$分为${n}$等分,考察其中的区间${[t_i,t_f]}$,在这一区间内求解上述方程。
由于${\lambda_r}$是常值函数:
由控制方程:
记$t_g=t_f-t$,则只要求解出${\lambda _r}$与${\lambda_v(t_f)}$就可以根据此时的${t}$得到最优的加速度,进而推算出此时的推力和燃料消耗,对加速度进行积分,与边值条件进行联立,得到:
这个坑就先挖了不填了,可能以后如果遇到无人车或者无人机之类的方面我再填一填,实际上根据2014A的结果来看,CUMCM直接拿最优控制来处理也并不是加分项,可能是这样专业性太强,实际上当时的许多队伍选择了离散化轨道和一些别的数值方法,得到的效果虽然并不相同,但对于当时的2014A评阅要点并未对结果有要求,应该是基于无穷维优化简化为有限维后精度的丢失。通过深圳杯和2014A也简单的对泛函和变分有了一定的了解,接着摆烂了。